

1. 서 론
자율주행 자동차는 많은 연구와 개발을 통해 크게 발전해 왔으며, GM의 자회사인 크루즈(Cruise)는 샌프란시스코에서 레벨 4 로보택시 운영 허가를 받았다. 하지만 출동 중인 소방차 충돌과 여성이 깔려 중상을 입는 사고로 인해 인해 운행이 24시간 중단되었다. 자율주행 기술은 교통 효율성 향상과 사고 감소를 목표로 하고 있지만, 실제 환경에서는 많은 위험 요소가 여전히 존재 한다. 복잡한 도시 환경에서는 다양한 변수에 대응하고 지속적인 연구와 기술적 개선이 필요하다. Euro NCAP(New Car Assessment Program)에서 시행하는 사고 예방 안전 시나리오는 차량의 안전 수준을 평가하기 위한 기준이 되며, 이를 바탕으로 자율주행자동차의 안전성을 검증하기 위한 시나리오 개발이 필요하다.
자율주행 자동차의 안전성을 확보하기 위한 선행 연구로서, 고속도로 주행 시나리오를 통한 평가 방법을 제안했으며, 실제 차량 주행 데이터를 이용해 안전성을 검증하고 분석하였다.(1) 또한, 자율주행 자동차의 충돌 시나리오를 분석하기 위해 실제 국내외 교통사고 데이터를 기반으로 차량 간 충돌 시나리오를 선정했으며, 다양한 충돌 매개변수를 분류하여 충돌 심각도 지수(SI)를 계산하고 안전성을 평가하였다.(2)
가상 환경을 통한 다양한 주행 시나리오의 시뮬레이션은 자율주행 자동차의 반응 및 안전성을 평가하고, 자율주행 기술 검증과 안전 기준 개발에서 시나리오의 중요성을 강조한다. 이는 다양한 테스트 환경에서 차량 성능을 평가하는 방법을 제시하고 있다.(3) 자율주행 자동차의 충돌 회피 시스템 개발 및 검증을 위해 국내 교통사고 데이터를 분석하고 기계학습을 활용하여 위험 시나리오를 생성하는 방법을 제안했다. 특히 AEB가 작동되는 경계조건에서 생성된 시나리오로 센서 알고리즘을 테스트하고 반응을 향상시키는 방법으로 자율주행 기술의 안전성을 검증하였다.(4)
상용차 군집 주행 시 차간거리를 효과적으로 제어하기 위한 전략을 제안했으며, 이를 주행 시나리오를 기반으로 시뮬레이션을 통해 검증하여 군집 주행의 안전성과 효율성을 향상 시키는 방법을 제안하였다.(5)
군집자율주행 기술이 미래 군 수송 분야에서 핵심적인 대안이 될 수 있음을 제안하였고, 군사 분야 적용의 필요성과 미군의 군집자율주행 기술 개발 사례및 전략등을 제언하고 있다.(6) 군집주행 시뮬레이터인 VENTOS를 확장하여 시나리오 시뮬레이션을 수행하여 이 시뮬레이션을 통해 가변성으로 인한 군집주행 위험성을 제거하고 안전한 군집주행을 가능함을 확인했으며, 시뮬레이션의 유요성을 입증했다.(7) 유럽에서 군집주행을 운전자 개입 없는 완전 자율 군집주행을 목표로 단계별 로드맵을 추진하여 기술 표준화, 인프라 개선, 복잡한 규제 프레임워크 등을 제안하였다.(8)
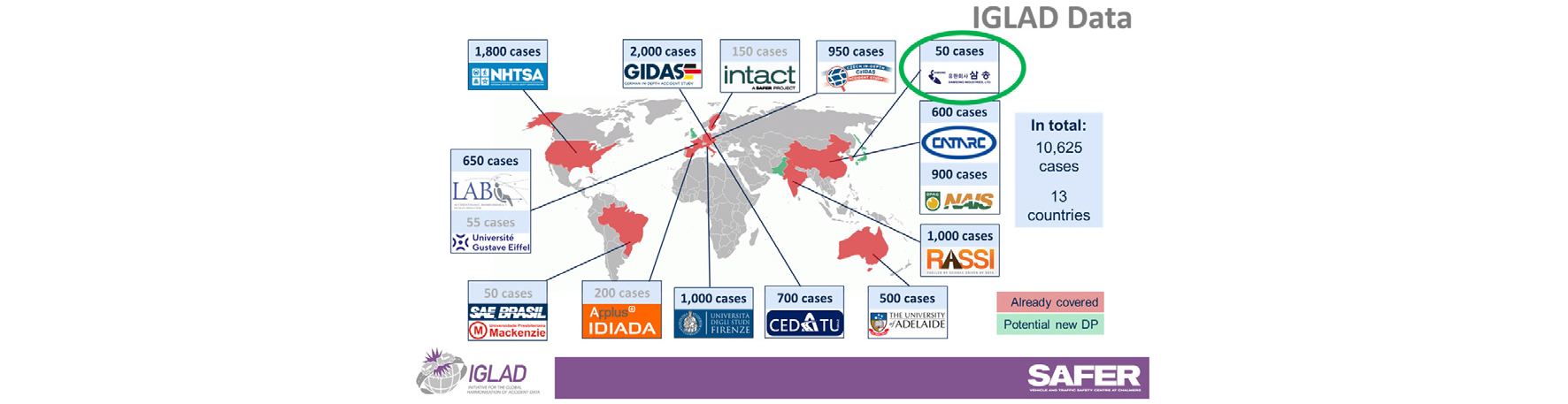
(유)삼송에서 ACCC(Automotive Collision Case Catalog)를 사용하여 자율주행자동차 시나리오를 제작한다. ACCC는 국내 교통사고 데이터베이스로 엣지케이스 시나리오 개발과 자율주행자동차 안전성 평가 및 활용 목적으로 사용한다. 교통사고 데이터베이스 플랫폼은 국제단체 표준 비영리적 연구 목적으로 데이터를 사용하고 있는 iGLAD의 Codebook 포맷으로 제작되어 있다. 또한, ACCC는 교통사고 분석 프로그램인 PC-Crash를 활용한 시뮬레이션 및 사고 데이터를 포함하고 있으며, Fig. 1과 같이 iGLAD 회원으로 참여하고 있어 전 세계 13개국의 10,625개의 교통사고 데이터베이스 접근 할 수 있는 권한을 가지고 있다. 본 연구는 PC-Crash를 이용하여 비자율주행자동차의 교통사고 중 타이어 이탈 사고 시뮬레이션을 수행하고, 이를 바탕으로 시나리오를 생성하였다. 이 시나리오를 군집주행자동차에 반영하여 타이어 충돌을 피할 수 있는 다양한 매개변수 조건을 찾고, 이를 분석하기 위해 충돌 회피 매개변수를 적용하여 분석하고자 한다.
2. 본 론
2.1. Edge case
국내에서 발생하는 일반적인 교통사고와 다른 edge case를 Fig. 2와 같이 분류하였다.

최근 속도로와 국도에서 발생하는 (a)타이어 이탈 사고, (b)판스프링 사고, (c)적재물 고정 불량 사고, (d)대형 금속 코일 추락 사고 등 네 가지의 edge case를 나타내었다. 이러한 사고들는 예측하기 어렵고 발생 확률은 낮지만, 한번 발생하면 2차 또는 3차 연쇄 사고로 이어질 가능성이 커 대형사고(3명 이상 사망자 또는 20명 이상의 사상자)로 발생 할 수 있다. 이러한 사고들은 시나리오로 구성하여 실차 시험까지 진행하는 데는 많은 어려움이 있어 해당 사고 시나리오는 시뮬레이션을 통해 실차 시험을 대처 하여 검증할 수 있다. edge case의 모든 사고 사례의 시뮬레이션이 필요하지만 본 연구에서는 타이어 이탈 사고를 선정하여 연구를 진행한다.
2.2. 타이어 이탈 사고
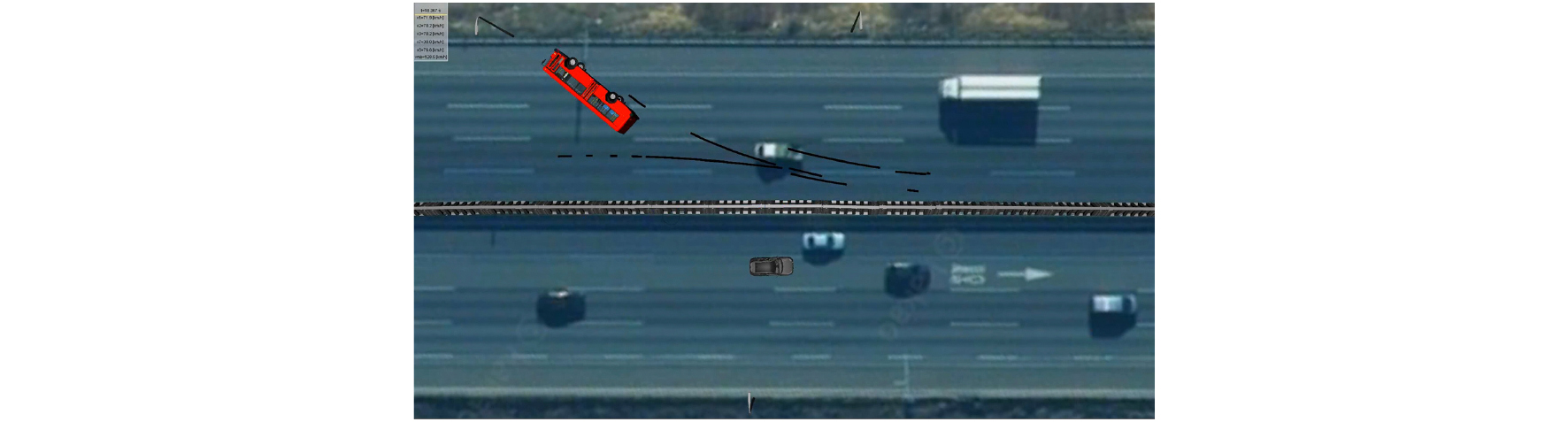
본 연구에서는 영상 확보 및 선명한 화질 조건을 모두 충족하는 타이어 이탈사고로 Fig. 3에 제시된 2024년 발생한 타이어 이탈사고를 선정하였다. 해당 사고는 화물차에서 타이어가 이탈되어 중앙분리대를 충돌 이후 1차선, 2차선 사이에서 여러 번 튕겨 반대 차선으로 넘어가 첫 번째 버스는 타이어를 보고 피했지만, 두 번째 버스는 피하지 못하고 운전석 정면 유리에 충돌한 사례이다. 영상 데이터로 확인 할 수 있는 것은 타이어 이탈, 중앙분리대 충돌, 튕기고 땅에 착지하는 시간 등을 프레임과 식 (1), (2)를 통해 확인 할 수 있다.
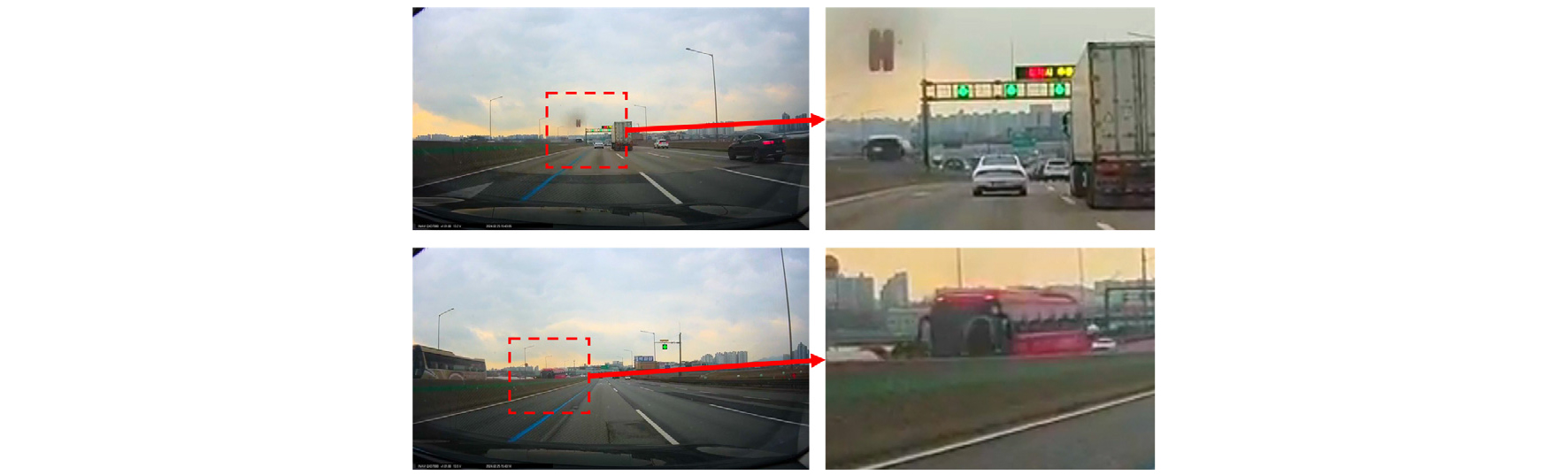
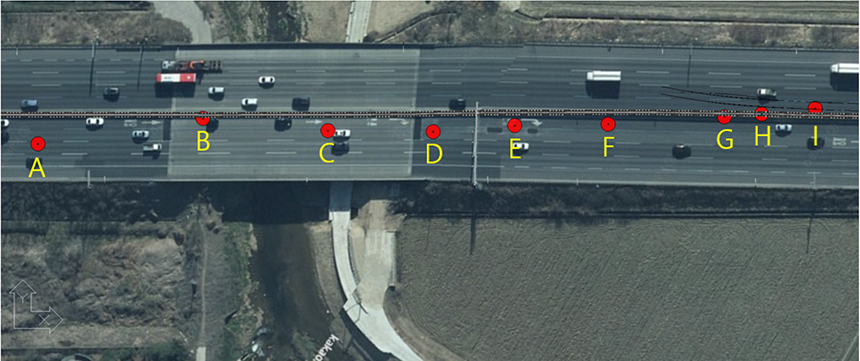
Table 1과 같이 타이어 이탈 사고 지점의 위치에서 타이어 이동 시간을 위성사진에 표시하였다. 타이어 이탈 지점(A)부터 반대 차로에서 버스와 충돌한 지점(I)까지의 타이어의 총 이동 시간은 약 12.45 sec로 나타난다. 해당 영상은 화물차 뒤에 따라오는 차량의 블랙박스 영상으로 정확한 타이어 위치가 명확하게 보이지 않아 중앙선, 차선 분리선, 노면 문자 등의 노면표시를 기준점으로 활용하는 방법을 적용했다. 위성사진을 통해 실제 도로의 물리적 거리를 파악하고 블랙박스 영상 프레임에서 도로표시에 도달하는 시간을 확인하는 방식으로 도출한 결과 약 12.45 sec 이다.
Table 1.
Tire progress time by frame
 | |||||||||
| Point | A | B | C | D | E | F | G | H | I |
| Time[sec] | 0 | 2.45 | 4.15 | 5.9 | 7.31 | 8.72 | 10.0 | 11.1 | 12.4 |
| iteam |
Tire breakaway |
Median strip collision | 1 Bounce | 2 Bounce | 3 Bounce | 4 Bounce | 5 Bounce |
Median strip collision |
a bus crash |
2.3. 시나리오 제작
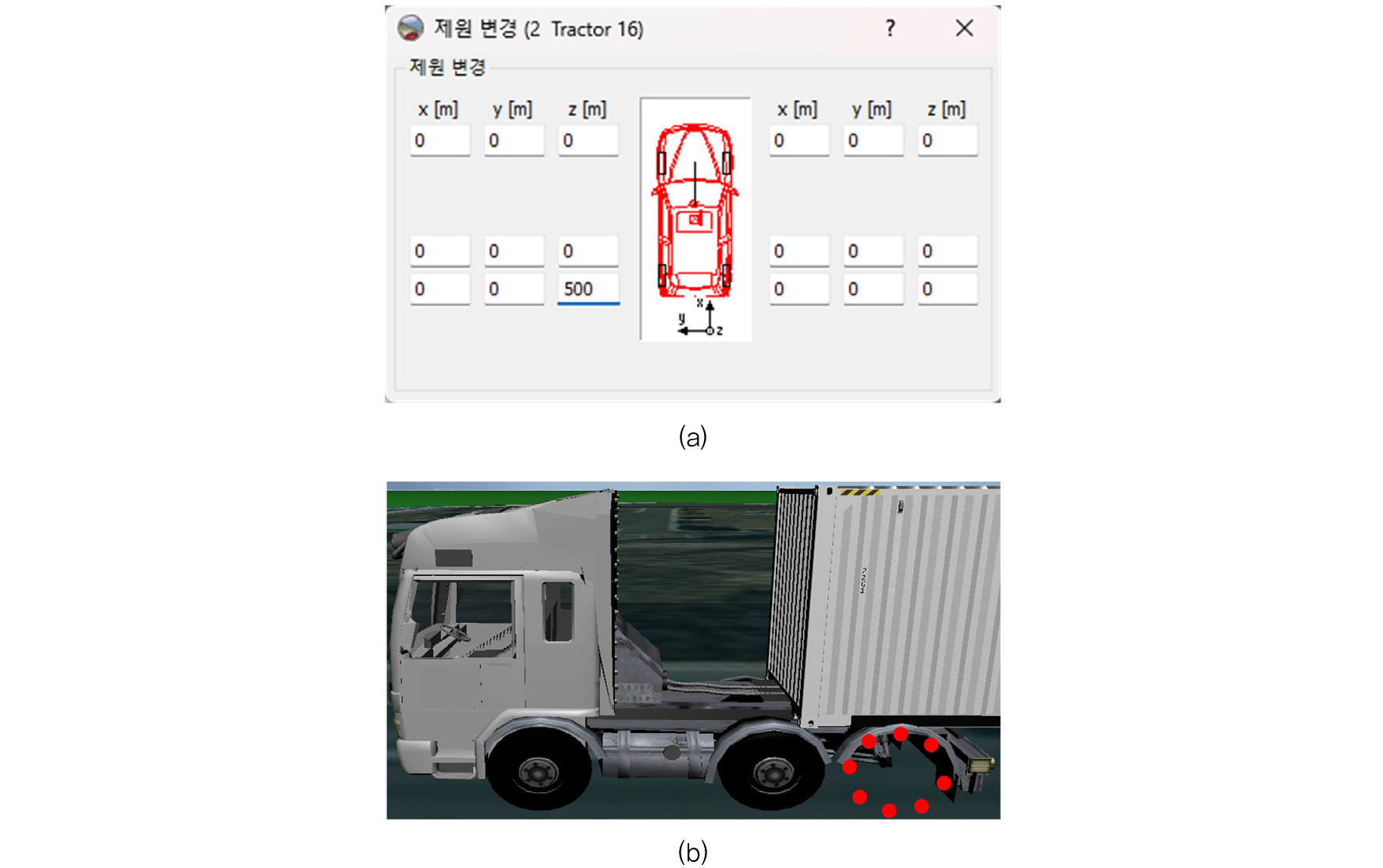
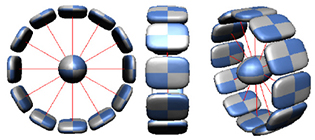
시나리오는 PC-Crash 소프트웨어를 활용하여 제작되었으며, 이를 군집주행 시나리오 적용하였지만, PC-Crash 환경에서는 군집주행의 핵심 기능인 차량간 통신(V2V) 및 연동제어 기능의 구현에 제한이 있다. 이에 따라 시뮬레이션에서는 군집주행의 차간거리 기준을 반영하여 반대 차선의 버스 움직임을 모델링하였다. 화물차의 속도는 중요 쟁점이 아니라 평균 속도로 설정하였다. PC-Crash에서 타이어 이탈 및 터지는 현상 재현이 불가능하여, 타이어 제원 변경 시퀀스를 활용하였다. 제원 변경 시퀀스는 충돌 이후 타이어의 위치가 변경되거나 이탈하는 경우 사용하는 시퀀스이다. Fig. 4(a)와 같이 타이어 제원 변경 시퀀스에서 해당 바퀴의 Z 값을 높게 설정하면 (b)와, 같이 타이어가 없는 것처럼 나타나고 타이어가 빠진 것처럼 차량 거동 시뮬레이션 된다. 화물차에서 타이어 빠지는 시점을 설정하여 모델을 제작한다. PC-Crash에는 타이어 모델이 별도로 존재 하지 않아 Multibody로 타이어 모델 제작이 필요하다. Multibody는 블록 형태로 여러 블록을 연결 하여 자전거, 오토바이 등의 모델을 제작할 수 있고 속도 설정이 가능하다. 본 사례의 화물차 타이어는 내측, 외측 2개씩 타이어가 달려 있는 모델로 1차 타이어 모델은 Multibody 블록 2개만 사용하여 제작하는 방법을 사용하였지만, 시뮬레이션 시 타이어가 중앙분리대 충돌 Table 1에서 B 지점에서 튕겨 올라야 하는 타이어 모델이 필요하여 2차 타이어 모델을 제작하였다. Table 2와 같이 타이어 모델 1차, 2차 모델을 비교한 것으로 블록의 수는 2차 모델이 13개, Joint 12개, Joint type은 1차, 2차 모두 Fixed로 제작하여 화물차에서 타이어 이탈 시점부터 타이어 모델은 Multibody로 변경되어 시뮬레이션 된다.
타이어 모델은 2차 모델로 시뮬레이션을 진행하고 타이어 이탈 시점부터 Multibody로 변경되는 것은 PC-Crash의 Vehicle activation 기능으로 시작, 끝 활성화 시간을 설정하였다. 또한, Multibody의 Contact Model은 총 3가지로 ① Ellipsoid to Ellipsoid Contacts, ② Ellipsoid to Vehicle Contacts ③ Ellipsoid to Ground Contacts로 구성되어 있고 본 시나리오에 적용된 Contact Model은 ③이다. Ellipsoid to Ground Contacts는 Ellipsoid가 지표면 접촉계산으로 속도가 없으면 지표면이 Ellipsoid에 가해지는 움직임이 없는 것을 가정한다. 이 Contact Model은 보행자 모델이 지표면에 충돌하고 마찰이 발생하는 형태와 유사하다. 타이어가 중앙분리대 충돌 이후 튕기면서 지표면의 아스팔트와 몇 번 충돌이 이루어지고 이때 Multibody Hysteresis의 변수가 사용된다. 이는 탄성 및 복원계수를 의미하고 기본값은 0.1에서 최대 값 1 사이의 값을 설정할 수 있다. 최대 값 1로 설정 시 완전탄성으로 10 m 높이에서 Multibody를 아래로 떨어졌을 때 완전탄성으로 지표면 충돌 이후 10 m를 올라온다. 타이어가 중앙분리대 및 지표면에 충돌 이후 올라오는 높이는 블랙박스 영상으로 정확하게 측정할 수 없어 지표면 충돌 위치와 Table 1의 타이어 진행 시간을 확인하여 Multibody Hysteresis를 설정하였다.
2.4. 군집주행자동차
군집주행은 2대 이상의 차량이 줄지어 주행하는 방식을 나타낸다. 이러한 주행 방식은 차량 간 통신 V2V(Vehicle to Vehicle)를 기반으로, 화물차의 독립 제어가 아닌 연동 제어를 통해 안전성을 유지하고 일정한 차량 간 간격 제어로 연비 향상, 교통 혼잡 감소, 배출가스 발생량 감소, 운전자 편의성 향상, 사업용 차량 안전성 증대에 기여한다. 또한, 화물차 군집주행은 매년 증가하는 물류비 중 가장 큰 비중을 차지하는 수송비의 92.2%(9)가 도로 부분에서 발생하고 있는 만큼, 시급한 화물 운송 체계의 비용 절감에 기여 할 수 있다. 차량협력기반 순행제어장치 CACC(Cooprative Adaptive Cruise Control)를 통해 후미 차량의 제동장치는 선두 차량과 동시에 작동하여 후미 추돌 사고 발생 가능성을 감소할 수 있다. 본 시나리오는 버스 사고이지만 화물차 군집주행자동차 시나리오에 적용하여 시뮬레이션을 진행하였다. 화물차의 군집주행이며 고속도로 주행 시 속도는 50~90 km/h로 운행될 때 차량 간격은 최소 12.5 m를 유지(10) 할 수 있는 자료를 바탕으로 본 시나리오에서 선두 차량 버스가 타이어를 피하고 후속 차량 버스가 타이어와 충돌하는 사례로 선행 차량과의 차간거리 확인 시 12.66 m로 확인되었다. 이에 따라 선두 차량과 후속 차량의 속도는 사고 발생 시와 동일한 조건에서 선행 차량과의 차간거리를 5 m 단위씩 늘렸을 때 타이어 충돌 회피가 가능한지 확인하였다.
2.5. 시뮬레이션 결과
본 시뮬레이션은 화물차 타이어 이탈 사고를 재현하고 이를 군집주행자동차 시나리오로 적용하여 선두 차량과 후속 차량 간 거리 변화에 따른 충돌 회피 여부를 확인한 결과이다.
사전 연구자료에 따라 차량 최소 간격은 12.5 m이고 타이어 이탈 사고 재현한 결과 차간거리는 약 12.66 m로 나타나는 것으로 차간거리를 +5 m 식 단계별로 적용한 결과이다. 후속 차량 제동 시점은 선두 차량이 타이어를 피하고 타이어가 처음 보이기 시작하는 시점부터 급제동을 적용하였다.
Table 3에 나타낸 것과 같이 선두 차량과의 차간거리에 따른 결과를 나타낸 것이다. 시뮬레이션에서 선두 차량과의 차간거리 이미지와 충돌 시점의 이미지를 비롯해 충돌, 회피 여부도 나타내었다.
Table 3.
Avoid collision due to inter-vehicle distance
| Image | Result | ||
| inter-vehicle distance | a tire collision | Crash | Evasion |
 | ● | × | |
 |  | ● | × |
 |  | ● | × |
 |  | ● | × |
 |  | ● | × |
 |  | ● | × |
 |  | ● | × |
 |  | ● | × |
 |  | ● | × |
 |  | ● | × |
 |  | ● | × |
 |  | ● | × |
 |  | × | ● |
군집주행 시 차간거리가 짧을수록 교통 흐름 개선 및 연비 효율성 향상과 경제성은 높아지지만, 이와 같은 타이어 이탈 사고 시나리오를 적용했을 때 차간거리 약 72.5 m에서 타이어 회피가 발생하는 것으로 나타난다.
군집주행자동차 차간거리 변수에 따른 타이어 이탈 시나리오 적용 결과 차간거리가 증가할수록 타이어 충돌 위치가 운전석에서 조수석으로 이동하며, 차간거리가 약 72.5 m 이상일 때 충돌 없이 회피가 발생하는 것을 확인 할 수 있다.
군집주행의 주목적은 선두 차량을 추종하는 것으로 선두 차량이 타이어를 회피할 때 조향각은 -90~-110 deg로 나타난다. 이와 같이 후속 차량이 타이어를 확인 할 수 있는 지점부터 선두 차량의 조향각 -90~-110 deg를 적용한 결과 모두 충돌이 발생하여 최대 -300 deg까지 설정한 결과 타이어와 충돌하게 되고 충돌 위치는 운전석에서 차량 왼쪽 측면을 충돌하여 전복이 발생하고, 타이어 회피가 불가능하게 된다.
Fig. 5와 같이 차량의 조향을 변수로 설정하고 선두 차량의 조향각과 동일한 각도에서 점차 조향각을 증가시켜도 타이어와의 충돌로 전복이 발생하여 회피가 어려운 것을 확인하였다.
군집주행자동차는 차량간 통신 V2V 및 V2X(Vehicle to Everything)를 통해 선두 차량이 후속 차량에게 타이어 보이는 H 지점부터 몇 초까지 통신을 줘야 타이어를 회피할 수 있는지 추가 분석하였다.
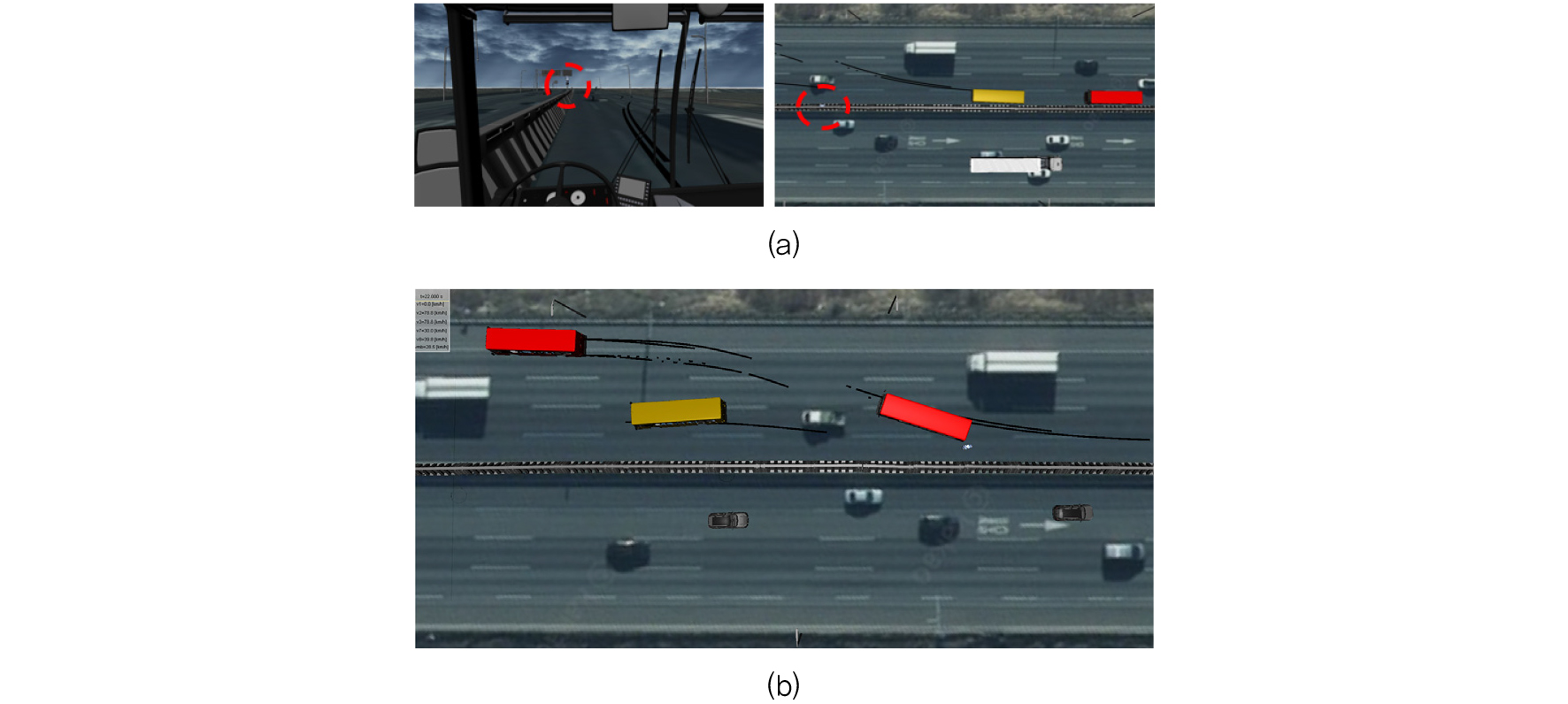
시뮬레이션으로는 두 차량 간의 통신 연결은 할 수 없어 선두 차량이 타이어 H 지점부터 +0.01 sec 간격으로 통신한다는 가정하여 후속 차량에 선두 차량과 같은 조향을 설정하였을 때 회피할 수 있는 최대시간을 찾기 위해 반복적인 시뮬레이션을 통한 결과 Fig. 6과 같이 (a)는 선두 차량이 타이어를 발견한 H 지점에서 +0.48 sec까지 통신이 이루어질 경우만 타이어 회피가 (b)와 같이 가능하며, 이후의 모든 시간에서는 충돌이 발생하는 것으로 나타났다. 따라서 선두 차량이 타이어를 발견한 후 0.48 sec 동안만 후속 차량에게 통신이 제공된다면 본 시나리오에서는 타이어 회피가 가능함을 확인 할 수 있었다.
자율주행자동차의 안전성을 높이기 위해 실제 교통사고를 반영하여 도로 상황과 돌발적인 장애물을 고려한 시나리오를 통해 군집주행 시 차간거리, 조향각도, 차량 간의 통신으로 타이어 충돌 회피 유무를 확인 할 수 있었다.
시뮬레이션 결과를 통해 다음과 같은 결과를 도출 할 수 있다.
① 차간거리: 12.66 m에서 5 m 간격으로 단계별로 증가시킨 시뮬레이션 결과 차간거리 72.5 m에서 타이어 충돌을 회피할 수 있음을 확인할 수 있다.
② 조향각도: 선두차량의 조향각도를 기준으로 최대 -300 deg까지 설정한 결과, 모든 경우에 충돌과 전복이 발생하여 회피가 어려운 것으로 확인된다.
③ 통신: 군집주행자동차는 차량 간 통신(V2V 및 V2X)을 통해 선두 차량이 후속 차량에게 타이어 발견한 시점부터 약 0.48 sec 이내에 정보를 제공하면 타이어 충돌 회피가 가능한 것으로 나타난다.
3. 결 론
타이어 이탈 사고는 발생 확률은 낮지만 발생하면 대형 사고로 발생할 수 있는 사고로 타이어 이탈은 실제 차량 테스트를 할 방법은 어렵고 별도의 장비가 필요하여 시뮬레이션으로 시나리오를 제작하여 군집주행에 검증한 결과를 다음과 같이 나타낸다.
1) 군집주행자동차 차간거리를 변수로 적용한 결과 최소 72.5 m의 선행 차량과의 차간거리에서 충돌을 회피하는 것으로 나타난다.
2) 후미 차량이 타이어 발견 시점부터 선행 차량의 핸들 조향 값의 변수에서 -90~-300 deg까지 적용한 결과 모든 상황에 타이어 충돌과 전도가 발생하며 회피하지 못하는 것으로 나타난다.
3) 차량간 통신으로 선두 차량이 타이어 발견 지점부터 몇 sec까지 통신으로 준다는 가정하에 핸들 조향을 적용한 결과 타이어가 중앙분리대와 충돌 이후 0.48 sec까지 후속 차량에 통신으로 타이어를 회피할 수 있는 것으로 나타난다.
본 연구를 통해 하나의 시나리오를 세 가지의 방법으로 군집주행자동차 시나리오로 적용한 결과 충돌 회피할 수 있는 조건을 찾을 수 있고 군집주행연구에 안전성을 위한 시나리오 활용될 것으로 기대된다.
