

1. 서 론
2. 기존 연구
2.1. 자율주행차 센서 기술
2.2. V2E 성능확보 기술
2.3. Kano 모델을 이용한 전략 연구 사례
3. V2E 성능확보기술에 대한 Kano 모델 분석
3.1. 개요
3.2. 설문 문항
3.3. Kano 모델 이론
3.4. Kano 모델 분석
4. 결론 및 향후 과제
1. 서 론
2022년 현재 우리나라는 범부처 자율주행자동차 R&D 기술 개발, 자율주행차 임시운행허가제도, 자율주행 시범운행지구 선정, 자율주행차 규제특구 등 활발한 실증연구가 진행되고 있다. 자율주행차는 인지-판단-제어라는 과정을 거쳐 스스로 도로 주행을 하고 인간 운전자보다 사고율이 낮아 안전하고 편리한 기술로 정착할 것으로 기대하고 있다.
최근 Tesla 오토파일럿 사고, Waymo 등의 기술개발 실증 등으로 자율주행차 기술에 대한 회의론적 시각도 있다. 그러나, 자율주행차 기술개발과 더불어 안전성 확보 기술도 활발히 진행하고 있어 복잡한 도로주행상황을 해결하고 사용자가 안심하고 탈 수 있는 교통수단이 될 수 있을 것이다. 자율주행차 안전성 확보를 위한 기술 중 하나인 자율주행차 센서 클리닝 기술은 센서 청소 장치가 핵심이다. 센서 청소 장치라 함은 센서의 시야가 손상되지 않은 상태에서 센서 표면에서 먼지, 빗방울, 새 배설물 또는 진흙을 제거하는 청소 작업을 수행하는 장치이다. 이를 통하여 주변 날씨 및 운전 조건 등의 외부 환경 요인으로부터 센서를 보호하고 센서의 수명과 차량의 안전을 보장할 수 있다. 이러한 센서 클리닝 기술은 V2E(Vehicle-to-Environment, (자율주행)차량 대 환경인지센서), 이하 V2E) 성능확보기술이라고 명명하여 국가 연구개발이 추진 중에 있다.
본 연구는 V2E 기술 개발 전략을 도출하기 위한 연구로서, 기술개발 방향과 제도화 항목에 대한 품질요소를 정의하고, 자율주행 전문가 집단에 대한 설문을 실시한 후 결과를 정량화하기 위하여 Kano 모델로 분석하였다.. Kano 모델은 카노 노리아키(狩野紀昭)에 의해 1980년대에 연구된 제품 개발에 관련된 상품기획이론이다.(1) Kano 모델은 어떤 상품을 기획할 때 각각의 구성요소에 대해 소비자가 기대하는 것의 충족, 불충족이라는 객관적 관계와 소비자의 만족, 불만족이라는 주관적 관계 사이의 상호관계를 통해 정량적으로 설명할 수 있다. 이를 통해 V2E성능확보 기술의 정책적/기술적 개발 전략을 제시할 수 있다.
2. 기존 연구
2.1. 자율주행차 센서 기술
자동차에 적용되는 센서는 약 30종의 200여 개가 장착되고 있으며, 자율주행기능을 보조하기 위한 인지센서로 초음파(장애물 인지), 카메라(물체 식별), 레이더(거리, 속도, 방향, 높이 측정 등), 라이다(형태 인식) 등의 첨단 스마트 센서가 적용된다. 대표적인 카메라, 레이더, 라이다의 특징 및 환경은 Table 1과 같다.
Table 1.
Characteristics of autonomous vehicle sensors
2.2. V2E 성능확보 기술
V2E 성능확보기술은 자율주행차 센서에 오염이 발생되었을 때 빠른 세척과 회복하는 기술을 통하여 기존 센서의 물체인식 등의 성능을 회복하는 기술을 지칭한다.(2) 자율센서클리닝 시스템(Autonomous Sensor Cleaning System) 기술과 관련되며 상기 시스템은 액체기반 클리닝시스템과 기체기반 클리닝시스템으로 상용화되어 있다. 액체기반 클리닝시스템은 워터 제트 또는 알코올과 같은 액체가 센서 표면에 뿌리게 된다. 기체기반 클리닝 시스템은 강한 공기 분사와 같은 가스 매체가 센서 표면 위로 분사, 공기는 전자적으로 제어되며 시스템은 다른 기계 구성 요소에 의존하지 않는다. Automotive Sensor Cleaning System Market(2020)에 따르면 Continetal AG, Valeo SA, DlhBowles, Roching Automotive, Ficosa International SA, Kendrion N.V., Actasys Inc., Waymo LLC, Seeva Technologies 등이 기업들이 관련 제품을 생산하고 있다.(3)
2.3. Kano 모델을 이용한 전략 연구 사례
이해인 등(2015)(4)는 사용자가 요구하는 스마트폰의 주요 속성에 대하여 품질요소 분류를 하기 위하여 Kano 모델을 적용하였다. Kano 모델을 통하여 매력적 품질요소 및 무관심 요소 등으로 분류하였고, 이를 고려한 제품 개발 및 품질향상 관리 전략 제시의 중요성을 설명하였다. 이때 스마트폰 사용자 110명의 설문지를 활용하였다. 이지혜 등(2015)(5)는 Kano 모델을 이용해서 사용자 관점에서 내비게이션 기능의 요구사항을 분류하고 Timko의 고객만족계수를 활용하여 만족과 불만족의 개선정도를 정량화하였다. 피설문자는 61명의 응답결과를 활용하였다. 도유미(2021) 등(6)은 휠체어 이용 장애인의 자율주행기반 미래 모빌리티 서비스에 대한 기능적 우선순위를 검토하기 위하여 Kano 모델 분석기법을 사용하여 휠체어 이용 장애인의 요구사항에 대한 기술적 선호도 우선순위를 제시하였다. 4개의 교통약자 그룹(휠체어 장애인, 보행장애인, 시각장애인, 고령자)에 대하여 각각 50명의 설문정보를 활용하였다. 김희진(2021)(7)는 지속가능관광을 객관적 지표 값으로 제시하고 지역 주민이 요구하고 만족하는 서비스 요인을 도출하기 위하여 Kano 모델을 적용하였으며, 일반주민 400부의 자료를 활용하였다. 전기체 등(2021)(8)은 검도장 서비스품질에 관한 소비자의 요구사항을 주관적 만족도와 객관적 만족도를 동시에 고려하고자 Kano 모델을 이용하였는데, 약 189명의 검도대회 참석자의 설문자료를 활용하였다. 송선옥(2022)(9)은 전자상거래 플랫폼 서비스 이용자의 관점에서 요구되는 서비스 품질속성과 제공자의 관점에서 요구되는 기술적 품질속성을 파악하고 이를 연계시켜 구조화하였다. 이를 통해 제한된 자원 하에서 더 집중해야 할 서비스 품질속성을 가치전략영역별로 규명함은 물론 서비스 품질제고를 위한 개선방향을 제안하였다. 이용자 측면 263명, 제공자 측면 32명의 설문지를 활용하여 전략을 제시하였다. 전기제 등(2022)(10)는 스크린골프장 서비스 품질요소를 파악하기 위하여 온라인 기반 설문으로 250명의 자료를 활용하여, 가장 필요로 하는 서비스 요소에 대하여 제시하였다. 손총 등(2022)(11)은 Kano 모델을 이용하여 박물관의 문화 상품의 속성과 품질을 분류하여 문화상품 개발 전략에 대하여 제시하였다. 설문은 총 180명의 자료를 기반으로 하였다. 양성민 등(2022)(12)은 차량용 음성비서를 예시로 기업들의 성공적인 지능형 신제품 개발을 위한 Kano-TOPSIS 기반의 모델을 제시하였으며, 이때 117명의 사용자를 대상으로 Kano모델을 통하여 사용자가 필요로 하는 기능을 선별 및 평가하는 데 활용하였다. 김진국 등(2022)(13)는 276명의 고객을 대상으로 한 설문을 통하여 국내 워터파크 운영기업들이 제공하는 서비스 품질에 대한 평가와 향후 전략적 마케팅을 제시하는데 Kano 모델을 적용하였다. 방제모 등(2022)(14)는 외식배달 플랫폼 품질 속성분류를 위하여 162명의 응답자 설문을 통하여 서비스 품질 요소를 분류하였다. 조진호 등(2022)(15)은 건설프로젝트에서 적극적인 리스크관리를 위하여 건설 실무자 16명을 대상으로 설문 조사한 내용을 기반으로 건설 리스크 관리요인 분류를 하고 개선 방안에 대하여 도출하였다.
선행 연구와 같이 Kano 모델은 관광, IT기기, 서비스 등 다양한 분야에서 활용이 되어 왔던 전략 연구 모형이다. 통상적으로 서비스 전략을 제시하기 위하여 계층화 분석법(AHP, Analytic Hierarchy. Process) 등의 다목적의사결정법(MODM: Multiple Objective Decision Making), 다속성의사결정법(MADM: Multiple Attribute Decision Making)등이 활용되어 왔다. 이러한 방법론은 독자적으로 사용하거나 병행적으로 사용하는 등 서비스 우선순위 등에 활용되어 오고 있다. 본 연구에서는 V2E성능확보기술 개발 전략을 제시하기 위하여 Kano 모델을 사용하였다. Kano 모델은 각 개별요소의 우선순위 등을 정량화하기 용이하며 초기 개발방향의 합리성을 설명하는데 적합하다.
3. V2E 성능확보기술에 대한 Kano 모델 분석
3.1. 개요
V2E 성능확보기술 개발 전략과 관련하여 다음과 같이 자율주행차 경력 전문가 대상으로 설문을 실시하였다. 본 설문은 본 기술에 대한 이해도가 높은 전문가 그룹을 활용함으로써 그 수가 많지 않더라도 유효한 설문 결과를 얻기 위한 것이다.
- 설문기간: 2021.08.23.~2021.08.27.
- 전문가: 30명
- 평균 자율주행차관련 경력: 5.27년
3.2. 설문 문항
Kano 모델을 V2E성능확보기술 전략 방향에 적용하기 위하여 델파이 기법을 이용하여 실무자 VOC(Voice of Customer)가 반영된 10개의 항목으로 제시하였다.
(1) 자율주행차 센서 클리닝 조건에 대하여 신차 출시시 안전기준을 강제 제도화
(2) 자율주행차 센서 클리닝 조건에 대하여 자동차 검사시 반드시 확인하는 강제 제도화
(3) 자율주행차 센서 클리닝 기술을 가진 차량에 문제가 발생(오염물질 미제거)시 운전자에게 알림을 주는 기능
(4) 자율주행차 센서 클리닝 기술이 각 센서별로 각각 클리닝 상황을 확인하는 기능(예, 카메라에 문제가 발생하면 알림 개별 알림기능 등)
(5) 자율주행차 센서 클리닝 기술이 전체 센서 상황을 통합하여 클리닝 상황을 확인하는 기능(예, 카메라에 문제가 생겼어도 다른 센서에서 충분히 센싱에 문제가 없다면 미 알림등의 통합 기능)
(6) 자율주행차 센서 클리닝 기술의 작동여부에 대하여 기록하는 기능
(7) LV.3 자율주행차에서 자율주행차 센서 클리닝 기술
(8) LV.4이상 자율주행차에서 자율주행차 센서 클리닝 기술
(9) 액체분사 방식의 자율주행차 센서클리닝 기술의 경우 잔여량 및 잔여기간 정보 제공
(10) 자율주행차 센서 클리닝 성능 수준에 대하여 등급화 제공
하나의 항목에 대하여 긍정적 질문과 부정적 질문의 2가지 질문으로 구성된 설문지를 작성하여 설문조사를 실시하였다. 응답지는 “(1) 마음에 든다, (2) 당연하다, (3) 아무런 느낌이 없다, (4) 하는 수 없다, (5) 마음에 안 든다”로 제시하였다. 이러한 구조화된 설문 방법은 기 검증된 Kano 모델의 기본 프레임워크를 따른다.
3.3. Kano 모델 이론
소비자들은 제품의 여러 가지 세세한 부분에 대해서 불만을 가지고 있음에도 불구하고 어느 정도 충분한 경우에는 그것을 당연하다고 느끼고 다시 새로운 것에 대한 만족감을 느끼지 못하는 ‘한계효용의 법칙’을 따른다. 이런 상황을 설명하기 위해 카노는 상품의 품질에 대한 이원적인 인식방법의 모델을 제시하게 되었다. 만족하는 것 또는 불만족하는 것이라는 주관적 측면과 함께 물리적 충족 혹은 불충족이라는 객관적 측면을 함께 고려하여 모델로 만들었다(Huiskonen, 1998(16); Kametani et al., 2010(17)). 이러한 모델은 Fig. 1의 품질을 느끼는 다음과 같은 다섯 가지 요소로 구분된다.
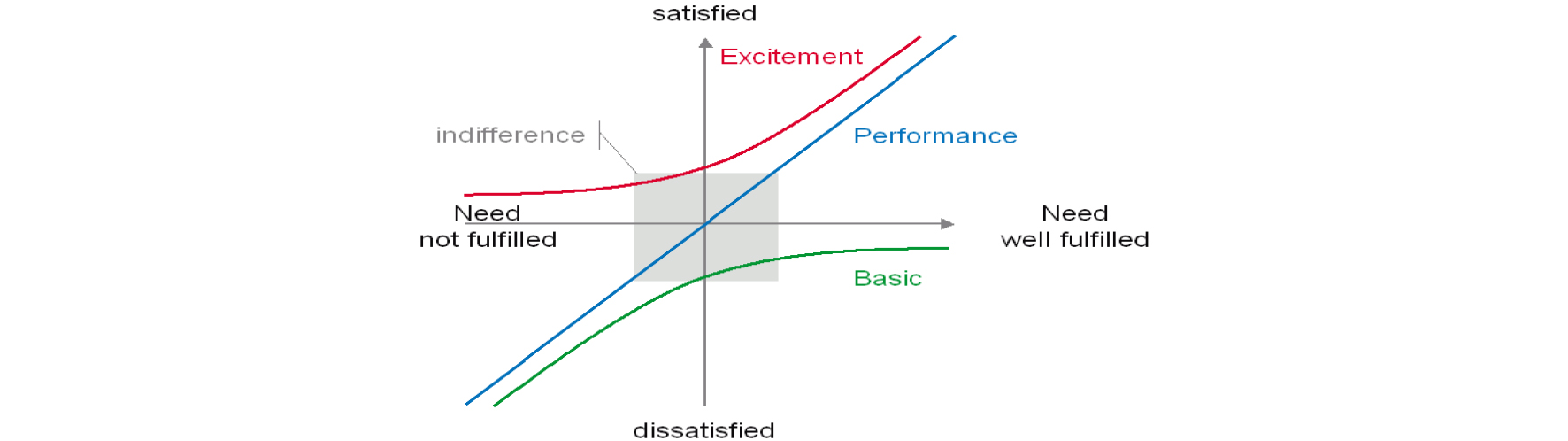
1.매력적 품질요소(Attractive Quality Element): 충족되는 경우 만족을 주지만 충족이 안 되더라도 크게 불만족없는 품질요소를 말한다. 고객이 미처 기대하지 못했던 것 혹은 기대를 초과하는 만족을 주는 품질요소가 될 수 있다. 이는 단순한 만족에서 고객감동(Customer Delight)의 수준을 달성할 수 있게 한다. 한편 이러한 요소의 존재는 고객들은 모르거나 기대하지 않았기 때문에, 충족이 되지 않더라도 불만을 느끼지 않는다.
2.일원적 품질요소(One-Dimensional Quality Element): 충족이 되면 만족하고 충족되지 않으면 고객들의 불만을 일으키는 품질요소이다. 일원적 품질속성은 만족의 증가와 불만의 증가에 모두 크게 영향을 미치므로 고객만족도 변화에 큰 기여를 할 수 있다.
3.당위적 품질요소(Must-Be Quality Element): 반드시 있어야만 만족하는 품질요소이다.
4.무관심 품질요소(Indifferent Quality Element): 만족하는 것과 만족하지 못하는 것 사이에 품질의 차이가 느껴지지 않는 요소이다.
5.역 품질요소(Reverse Quality Element): 충족되면 불만족을 일으키고 충족되지 못하면 만족되는 거꾸로 된 요소이다.
Table 2는 하나의 품질요소에 대한 긍정적인 질문과 부정적인 질문의 대답에 대한 평가 이원표이며, 평가 이원표에 의한 결과는 조사표에 집계하여 고객의 요구사항을 품질의 특성에 따라 분류하게 된다.
Table 2.
Kano’s two-way table of model quality evaluation
Timko(1993)(18)는 만족계수와 불만족계수를 제시하여 고객이 제품이나 서비스를 접했을 때 고객의 만족정도가 어느 정도 올라갈 수 있고, 불만족되었을 때 어디까지 떨어질 수 있는 지를 파악한 계수를 제시하였다. 주요 산출식은 다음과 같다.
여기서, SI : 만족계수
DI : 불만족계수
A : 매력적품질요소
O : 일원적품질요소
M : 당연적품질요소
I : 무관심품질요소
R : 역품질요소
j : 품질특성요소(1,..,.m)
만족계수가 1에 가까울수록 해당 품질의 충족이 만족도를 더 많이 증가시키는 반면, 불만족계수가 -1에 가까울수록 불충족시 불만족에 더 큰 영향을 준다. 이러한 측면에서 만족계수와 불만족계수 모두 품질의 중요도와 밀접한 관련성이 있다.
Tonitini(2007)(19)은 고객만족계수를 이용하여 Max(|SI|, |DI|)를 품질의 중요도 지표로 사용하였다. 품질의 중요도는 충족시 만족도가 얼마나 증가하는지 나타내는 만족계수와 불충족시 만족도가 얼마나 줄어드는가를 나타내는 불만족계수 모두에 의해 영향을 받는다. 다음과 같이 만족계수와 불만족계수의 평균인 ASC는 품질의 중요도 값으로 사용된다.
ASCj가 1에 가까울수록 j번째 품질의 변화(충족, 불충족)가 만족 또는 불만족에 미치는 영향이 크다는 것을 의미한다.
3.4. Kano 모델 분석
긍정적, 부정적 질문의 설문지의 설문조사 결과를 결합하여 품질 특성을 정리하였다. 품질 특성에 대한 빈도수를 이용하여 만족 계수와 불만족 계수를 산정하였다. V2E성능확보기술에 대한 Kano 모델 분석 결과는 Table 3과 Fig. 2와 같다.
Table 3.
Quality attribute judgment result
V2E 전략방향의 10가지 요소는 Fig. 2와 같이 매력적 품질요소, 일원적 품질요소, 당연 품질요소로 분포되었다.
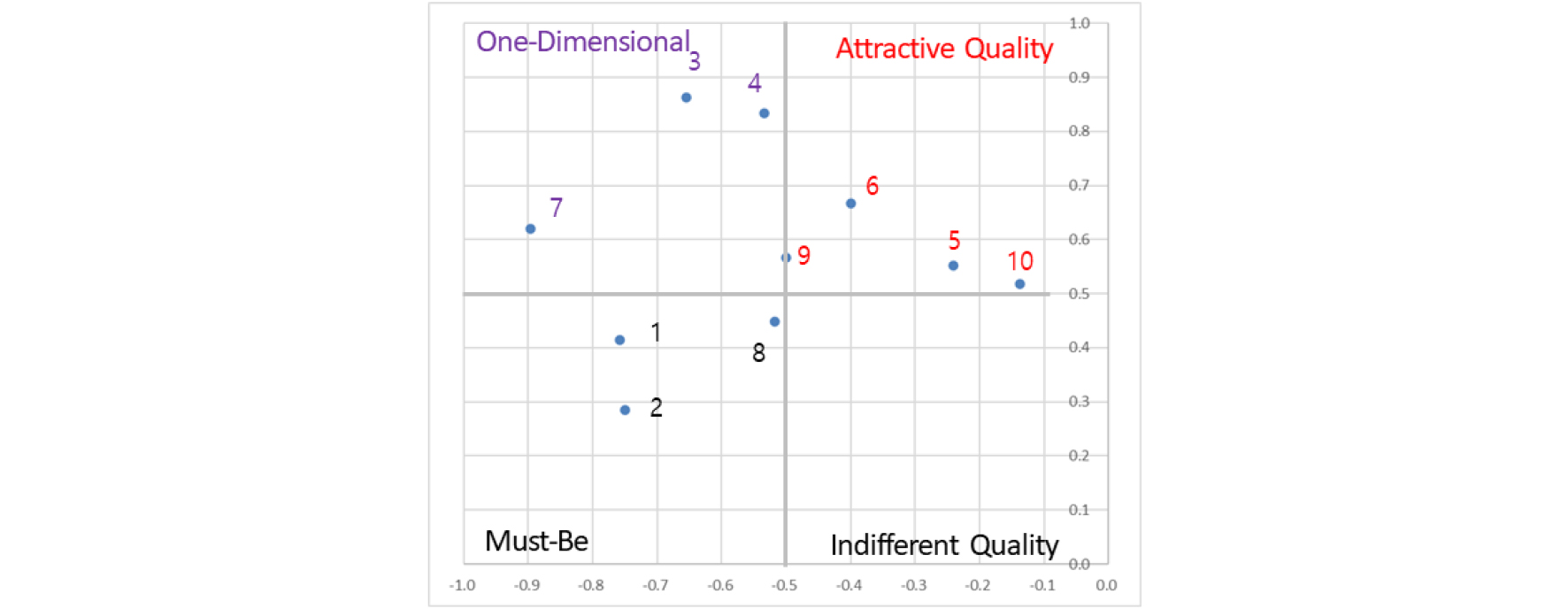
매력적 품질 요소로 5, 6, 9, 10의 항목이 나타났다. 매력적 품질은 충족되는 경우 만족을 주지만 충족이 안 되더라도 크게 불만족없는 품질요소이다. 5는 통합으로 센서를 확인하는 기능, 6은 자율주행차 센서 클리닝 기술의 작동여부에 대하여 기록하는 기능, 9는 액체분사 방식의 자율주행차 센서클리닝 기술의 경우 잔여량 및 잔여기간 정보 제공, 10은 자율주행차 센서 클리닝 성능 수준에 대하여 등급화 제공에 관한 것이다. 이는 V2E성능확보장치의 차별화된 상품화 및 서비스 전략의 기능으로 활용하면 좋은 요소이다.
일원적 품질요소는 3,4,7의 항목이며, 충족이 되면 만족하고 충족되지 않으면 고객들의 불만을 일으키는 품질요소이다. 3은 자율주행차 센서 클리닝 기술을 가진 차량에 문제가 발생(오염물질 미제거)시 운전자에게 알림을 주는 기능, 4는 자율주행차 센서 클리닝 기술이 각 센서별로 각각 클리닝 상황을 확인하는 기능, 7은 LV.3 자율주행차에서 자율주행차 센서 클리닝 기술이다. 따라서 V2E 성능확보장치는 3,4,7의 요소는 기본적으로 탑재하는 것이 좋을 것으로 판단된다.
당위적 품질요소는 1,2,8이며 반드시 있어야만 만족하는 품질요소이다. 1과 2는 자율주행차 센서클리닝 조건에 대하여 제도화하는 것으로 안전기준 등의 공공성이 확보된 제도화 추진이 요구되는 바이다. 8은 LV.4이상 자율주행차에서 자율주행차 센서 클리닝 기술로서 이또한 LV.4이상 차량은 센서클리닝 기술이 반드시 요구된다. 그 외 무관심 품질요인은 나타나지 않았다.
품질의 중요도 측면에서 살펴보면 자율주행차 센서 클리닝 기술을 가진 차량에 문제가 발생(오염물질 미제거)시 운전자에게 알림을 주는 기능이 매우 중요하다고 나타났다. 그 외 주요 순위는 ASCj의 순위를 살펴보면 Table 3에서 확인이 가능하다.
4. 결론 및 향후 과제
자율주행차의 이물질인 시야방해물질로 인하여 예기치 않은 차선 변경, 방향 전환, 운전자 시력 문제 경고, 도로측면으로 넘어가는 차량, 자동 조종 장치 또는 운전 보조 기능이 비활성화 될 수 있으며, 특히 LV.4 자율주행차에서는 매우 중요한 안전 요인이 될 수 있다. 여기서 시야방해물질은 물방울, 비, 벌레, 먼지, 새배설물, 물 때 등 자연에서 발생하는 먼지 등이 될 수 있으며, 자율주행차 센서를 오염시킬시 기능적/성능적 문제를 발생하는 요인이 된다. 이에 자율주행차 센서의 오염이 발생시 클리닝하는 V2E 성능확보기술에 대한 중요성은 자율주행차의 보급에 따라 더욱 부각될 것으로 예상된다.
본 연구는 이러한 V2E성능확보 기술 개발시 평균 5.7년 연구한 전문가집단 30명을 대상으로 제도적/기능적 요구사항에 대하여 제시하고, Kano 모델을 적용하여 기술개발 전략의 방향성을 검토하였다.
가장 중요한 것으로 당위적으로 있어야 하는 품질요소로 자율주행차 센서클리닝 조건에 대하여 제도화하는 것과 LV.4이상 자율주행차에서 자율주행차 센서 클리닝 기술로 나타났다.
V2E 성능확보기술의 만족도 요건으로 일원적 품질요소는 센서클리닝 기술을 알림을 주는 기능, 클리닝 상황을 확인하는 기능, LV3 자율주행차의 센서 클리닝 기술이다.
V2E 성능확보기술의 매력적으로 상품 및 서비스할 수 있는 요소로 통합센서확인 기능, 센서동작 기록 기능, 잔여량/잔여시간 정보제공 및 등급화 정보 제공 등에 대한 것이다.
향후 개발되는 V2E 성능확보기술은 이러한 품질요건을 반영하여 반드시 있어야 할 기능과 추가적 기능 등을 반영하여 개발될 필요성이 높다고 판단된다.
본 연구는 자율주행차 기술 전문가집단의 결과를 반영한 것으로 향후 상품화될 경우 실제 사용자를 대상으로 한 품질속성 평가 및 검증이 요구된다. 이를 통하여 기술개발의 성공과 함께 공공 안전 측면에서 자율주행차가 활용될 수 있기를 기대하는 바이다.
