
-
-
A Study of Vehicle V2X Communication Performance Safety Evaluation Technology
자동차 V2X 통신 성능 안전성 평가기술 개발에 관한 연구
-
Seonkeon Kim, Jaegyeong Lee, Hyesoo Kim
김선건, 이재경, 김혜수
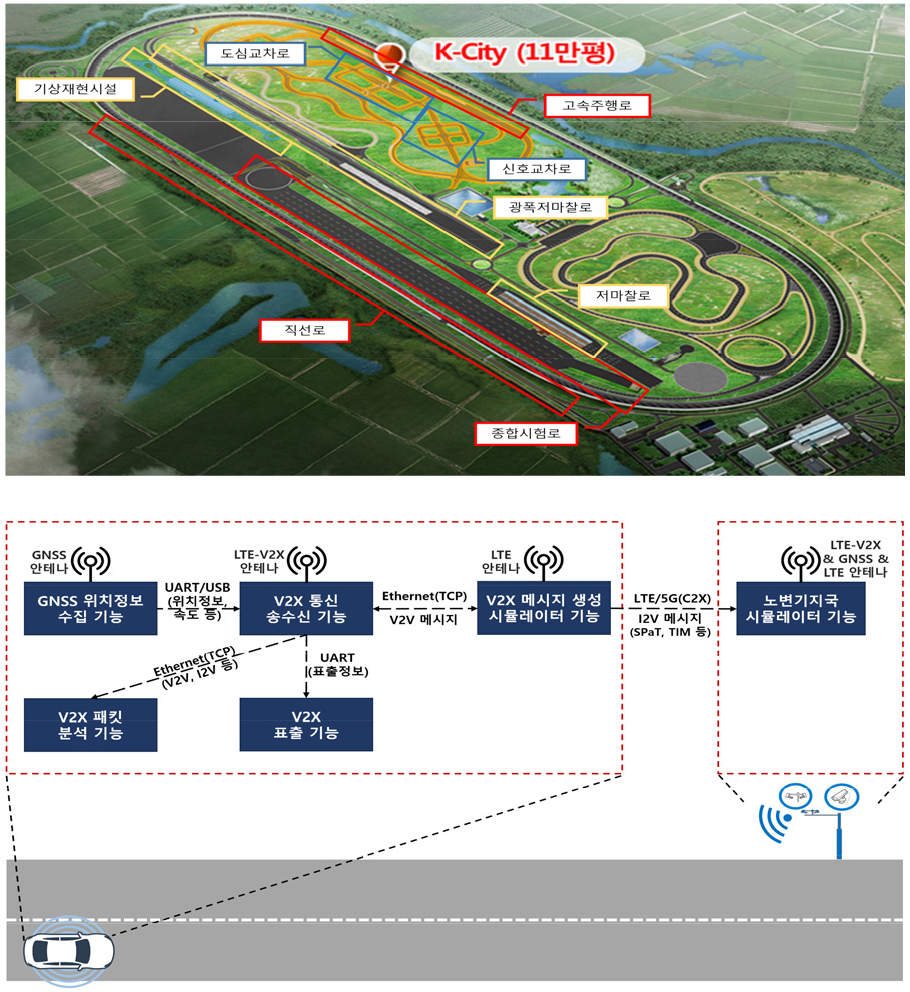
- V2X communication technology can overcome the limitations of existing Lv. 3 autonomous vehicles by recognizing surrounding traffic conditions and road hazards beyond …
- V2X communication technology can overcome the limitations of existing Lv. 3 autonomous vehicles by recognizing surrounding traffic conditions and road hazards beyond the recognition range of ADAS sensors, and its necessity is gradually increasing as a key technology for implementing Lv. 4 or higher autonomous driving. Major countries around the world (Europe, China, Japan), including Korea, are paying attention to accident prevention safety using V2X technology and have established a roadmap for the New Car Assessment Program (NCAP) and are introducing V2X technology as an NCAP evaluation item. In this study, we conducted research on the development of vehicle V2X communication performance safety evaluation technology, including evaluation items, evaluation environment, and evaluation methods for performance evaluation of V2X communication devices installed in vehicles when introducing V2X communication devices as evaluation items in the Korea New Car Assessment Program (KNCAP). - COLLAPSE
-
A Study of Vehicle V2X Communication Performance Safety Evaluation Technology
-
-
A Study on the eVTOL Safety Standards Based on Hydrogen Gas Fuel for Commercialization of Urban Air Mobility
UAM 상용화를 위한 기체수소연료기반 eVTOL 안전기준에 관한 연구
-
Eui Soo Kim
김의수
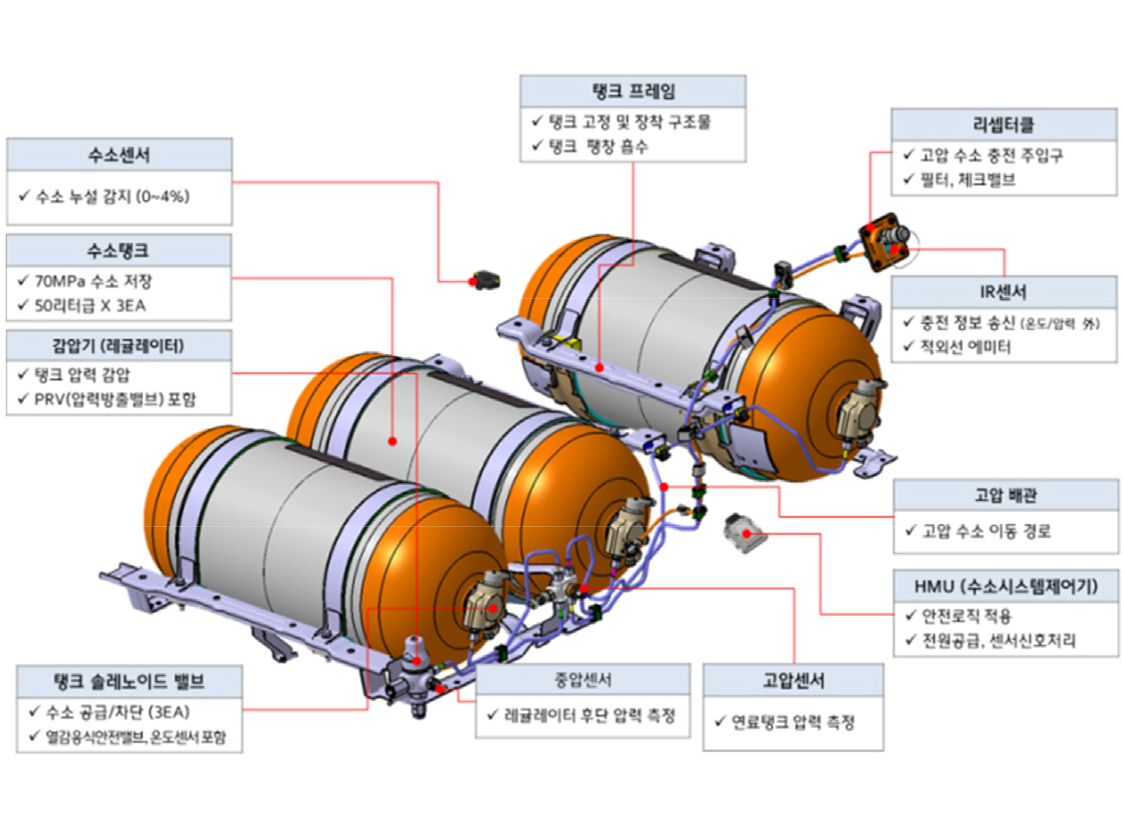
- According to the Ministry of Land, Infrastructure and Transport’s announcement of the K-UAM (Korea-Urban Air Mobility: Korean Urban Air Transport) roadmap, the …
- According to the Ministry of Land, Infrastructure and Transport’s announcement of the K-UAM (Korea-Urban Air Mobility: Korean Urban Air Transport) roadmap, the government is actively pursuing policies to operate and foster domestic urban air transportation commercialization services. Currently, models using pure electric power are mainly being developed, but due to the limitations of mileage and loading weight, the government aims to develop propulsion engines such as hybrid and hydrogen fuel for long-distance flights by the next 30 years. Among them, the development of hydrogen fuel-based UAM is expected to not only enable long-distance driving but also have a significant impact on eco-friendly carbon neutrality, which is emerging worldwide due to low environmental pollution. For the operation of hydrogen air mobility, the aircraft’s airworthiness standards must meet the aircraft technology standards, but it is difficult to apply the current aircraft technology standards because the shape and flight characteristics of the UAM aircraft being developed vary. There are also no regulations on hydrogen fuel engines for aircraft. In this study, the aircraft technology standards of hydrogen air mobility were reviewed in terms of hydrogen fuel applicability through a special aviation proof case using pure electric power, and the technology standards of hydrogen fuel devices were reviewed based on domestic hydrogen safety management regulations, laying the foundation for the first time in Korea. - COLLAPSE
-
A Study on the eVTOL Safety Standards Based on Hydrogen Gas Fuel for Commercialization of Urban Air Mobility
-
-
Vision-Language Model-based Grad-CAM Analysis for Explainable Electric Vehicle Drive Motor Fault Diagnosis
비전-언어 모델 기반 Grad-CAM 분석을 통한 설명가능한 전기자동차 구동 모터 고장 진단
-
Jaeseung Lee, Seohyung Cheon, Jehyeok Rew
이재승, 천서형, 유제혁
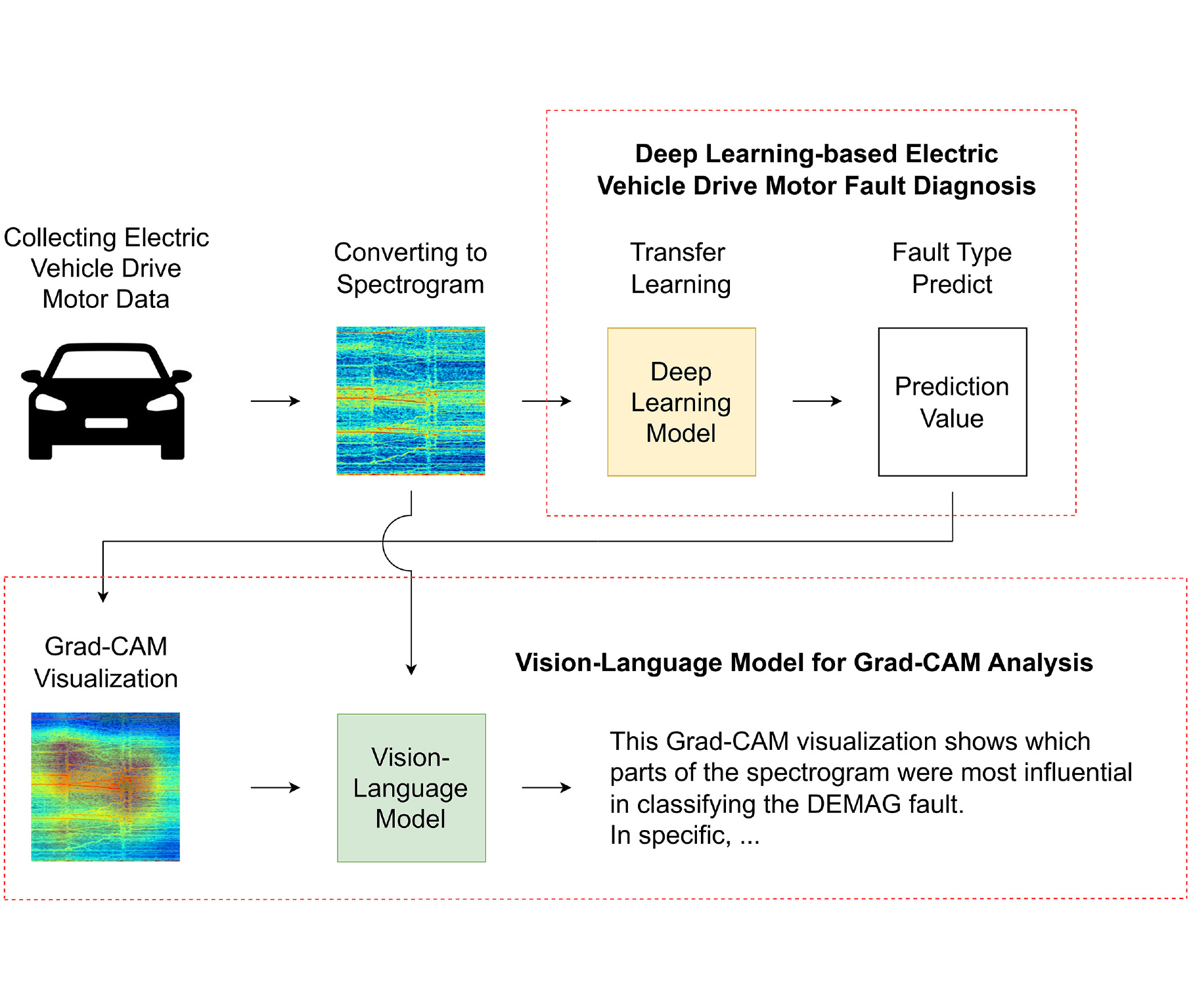
- With the increasing adoption of electric vehicles (EVs), ensuring the reliable operation of their drive motors has become a critical challenge. Motor …
- With the increasing adoption of electric vehicles (EVs), ensuring the reliable operation of their drive motors has become a critical challenge. Motor faults can directly lead to reduced performance, safety hazards, and costly downtime. To address this need, deep learning-based automatic fault diagnosis models have been actively explored, particularly those converting vibration signals into spectrograms to leverage their powerful classification capabilities. While these models achieve high accuracy in distinguishing various fault types, they suffer from the critical limitation of black-box decision-making, which hinders interpretability and trust. To overcome this limitation, this study proposes a novel framework that applies gradient-weighted class activation mapping (Grad-CAM) to a ResNet-based spectrogram classifier, visually highlighting the model's decision basis, and then uses a vision-language model (VLM) to automatically generate intuitive natural language explanations for the highlighted regions. By feeding the Grad-CAM heatmaps along with spectrogram time–frequency data to the VLM, the framework enables automatic generation of human-readable explanations, reducing the expert burden while improving transparency and trustworthiness. Experiments were conducted using vibration data collected from a Hyundai Ioniq Electric vehicle covering five fault types. Comparative evaluations across eight deep learning architectures confirmed that the ResNet-based model achieved the best classification performance. Moreover, the natural language explanations generated by the VLM were qualitatively evaluated and found to be consistent and reasonable, demonstrating practical feasibility. The proposed approach is expected to contribute to the development of a reliable and intelligent maintenance system for EV drive motors. - COLLAPSE
-
Vision-Language Model-based Grad-CAM Analysis for Explainable Electric Vehicle Drive Motor Fault Diagnosis
-
-
Sensitivity Analysis of Reclined Occupant Seatback Angle on Injury Risk During Autonomous Vehicle Crash Scenarios
자율주행차 충돌 조건에서 편의 자세 승객의 등받이 각도별 인체 상해 민감도 분석
-
Sunghyun Shim, Taewung Kim
심성현, 김태웅
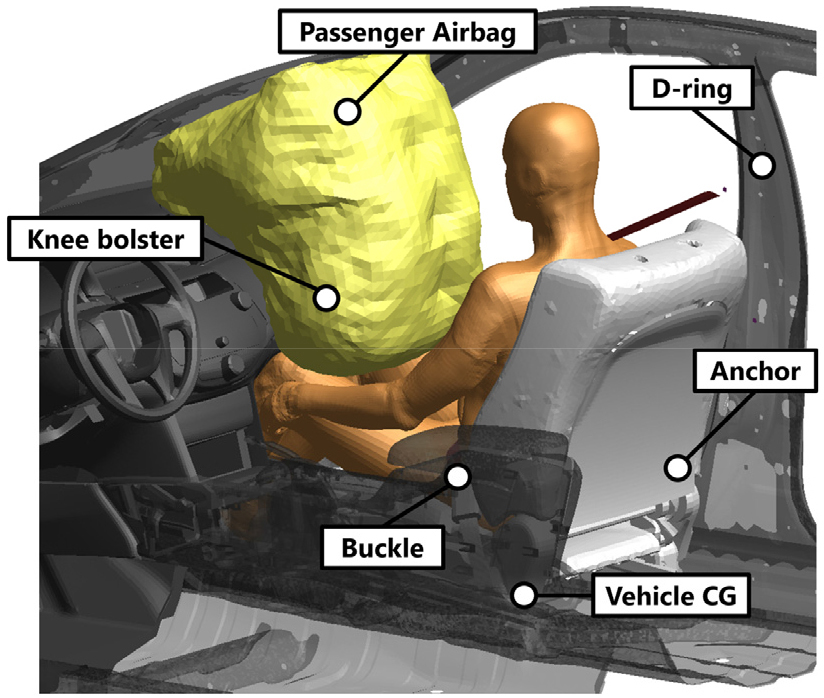
- The objective of this study was to analyze the effects of various reclined seatback angles on occupant injury risk during frontal collisions …
- The objective of this study was to analyze the effects of various reclined seatback angles on occupant injury risk during frontal collisions in autonomous vehicles. Crash pulses were obtained by performing LS-DYNA vehicle-to-vehicle crash simulations under autonomous vehicle crash conditions. Parametric crash simulations were conducted using an LS-DYNA mid-sized sedan vehicle model and the GHBMC human body model, considering variations in seatback angle, crash conditions, and seatbelt configurations. Injury probabilities for individual body regions were calculated from the simulation results, and the effects of seatback angle on injury risk as well as the occurrence of submarining were evaluated. Analysis results showed that the highest injury probabilities primarily occurred at seatback angles between 45° and 55°. Evaluation results can contribute to the development of reclined occupant safety assessment protocols for autonomous vehicles. - COLLAPSE
-
Sensitivity Analysis of Reclined Occupant Seatback Angle on Injury Risk During Autonomous Vehicle Crash Scenarios
-
-
A Comparative Study of 3D Modeling Techniques using Aerial Photography: Performance Analysis for Autonomous Drone Flight Path Planning
항공사진 기반 3D 모델링 기법 비교 연구: 드론 자율비행 경로 설정을 위한 성능 분석
-
Yoojeong Song, Jinpyo Jeon, Sang Ik Han
송유정, 전진표, 한상익
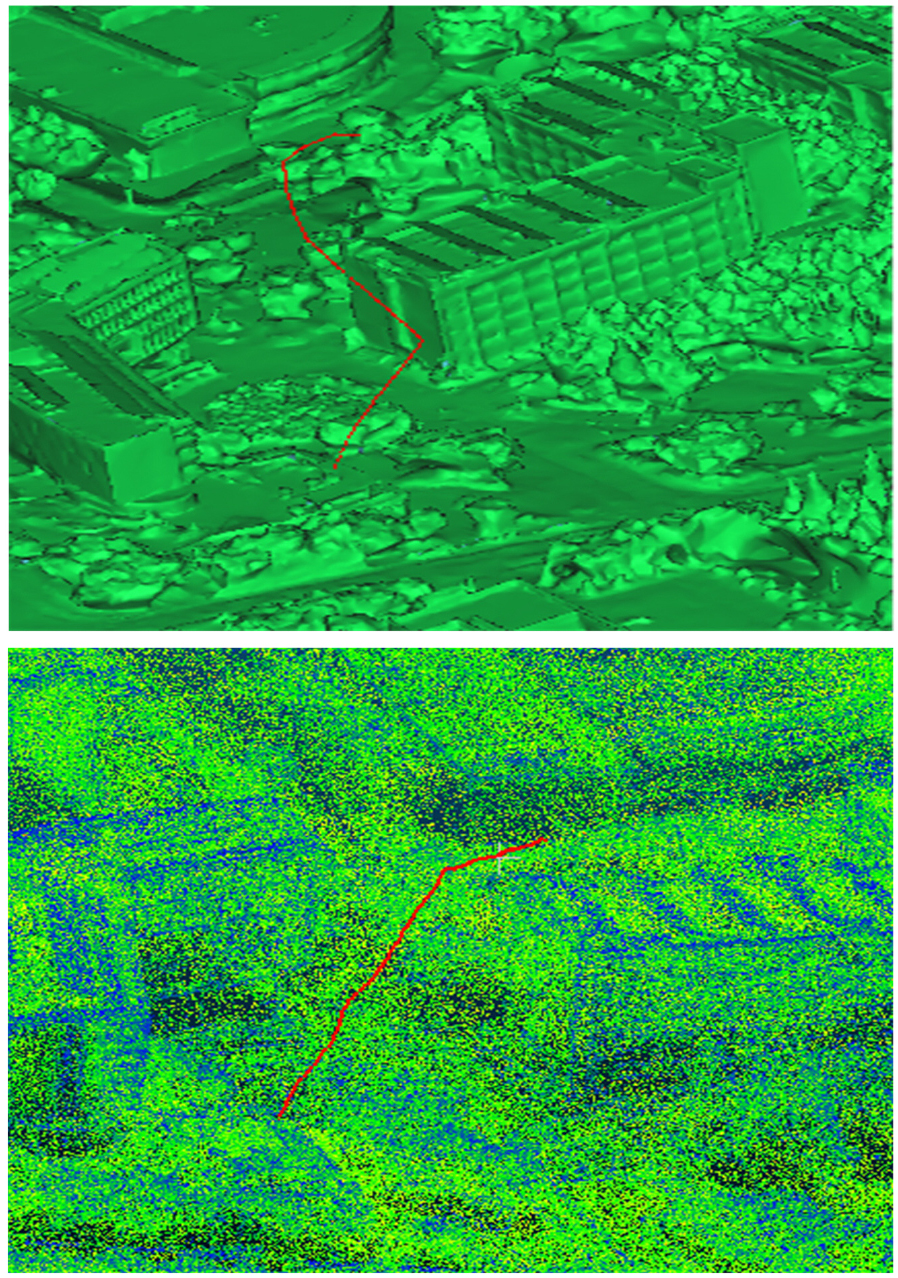
- This study explores the need for accurate and reliable 3D environment models that support safe autonomous navigation of unmanned aerial vehicles (UAVs). …
- This study explores the need for accurate and reliable 3D environment models that support safe autonomous navigation of unmanned aerial vehicles (UAVs). To evaluate suitable modeling techniques, we compare two representative approaches: the traditional Structure-from-Motion (SfM) and Multi-View Stereo (MVS) pipeline, which produces a 3D mesh, and the recently developed 3D Gaussian Splatting (3D GS) method, which expresses a scene using a large set of 3D Gaussians and renders it through differentiable splatting. Using a dataset of about 500 aerial images captured over the Semyung University campus, we construct both 3D models and evaluate their effectiveness by integrating them into an RRT*-based global path planning framework. Quantitative analysis reveals distinct performance differences between the two models: the 3D Mesh model generates shorter paths, fewer waypoints, and much faster planning time, while the 3D GS model produces longer paths, more waypoints, and slower planning time. These results suggest that the 3D Mesh model is more efficient and suitable for pre-flight planning, whereas the 3D GS model—despite higher computational cost—offers richer environmental detail that can support high-precision obstacle avoidance. Overall, this study highlights how the choice of 3D modeling can critically influence UAV navigation performance, particularly in terms of environmental awareness, obstacle detection fidelity, and operational safety. - COLLAPSE
-
A Comparative Study of 3D Modeling Techniques using Aerial Photography: Performance Analysis for Autonomous Drone Flight Path Planning
-

-
An Experimental Study on the Operational Limits of ACC Based on EuroNCAP Test Scenarios and Edge Cases
EuroNCAP 시나리오 및 엣지 케이스 기반 ACC의 작동 한계 특성에 관한 실험적 연구
-
Yeonsub Lee, Yunsu Lee, Jonghyuk Kim, Jungwoo Park, Hyunseo Han, Woojeong Jeon
이연섭, 이윤수, 김종혁, 박정우, 한현서, 전우정
- Despite the popularization of Adaptive Cruise Control (ACC), accidents caused by system limitations persist in real-world driving. This study systematically evaluates the …
- Despite the popularization of Adaptive Cruise Control (ACC), accidents caused by system limitations persist in real-world driving. This study systematically evaluates the dynamic performance and limits of ACC, aiming to secure fundamental data for future accident reconstruction and forensic analysis of Advanced Driver Assistance System (ADAS)-equipped vehicles. Real-vehicle experiments were conducted on two commercially available Korean ACC vehicles, utilizing EuroNCAP standard scenarios Car-to-Car Rear Stationary (CCRs), Car-to-Car Rear Moving (CCRm) and accident-reflective edge cases (Overlap, Angle). Results showed the maximum collision avoidance speed for a stationary target (CCRs) was 80 km/h, and the limit relative speed for a moving target (CCRm) was approximately 95 ~ 100 km/h. Crucially, collision risk increased sharply due to delayed detection or detection failure in edge cases like partially occupying the lane (Overlap) or skewed (Angle) targets. We suggest that these findings serve as crucial evidence for determining ACC operational limits based on the target’s dynamic and geometric state during accident investigation. - COLLAPSE
-
An Experimental Study on the Operational Limits of ACC Based on EuroNCAP Test Scenarios and Edge Cases
-
- Integrated 6-DOF Vehicle Dynamics Modeling and Simulation-Based Validation for 4-Corner Independent Driving Platforms
- Yu-sun Kim, Jae-poong Lee, Young-seung Yu, Jae-geun Bang
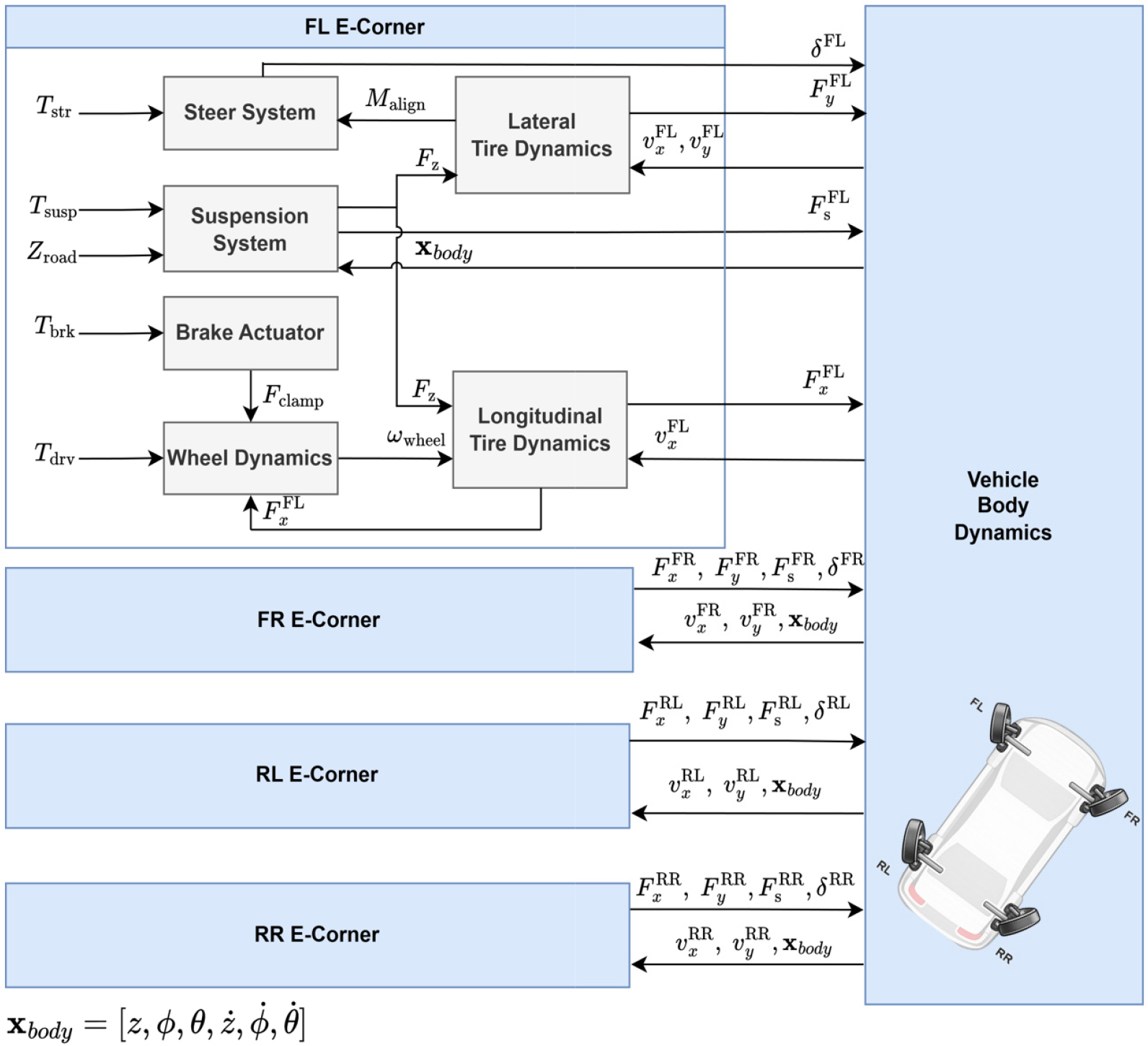
- This paper presents the development of an integrated vehicle dynamics simulator for e-Corner systems and its validation using simulation-based reference data. The …
- This paper presents the development of an integrated vehicle dynamics simulator for e-Corner systems and its validation using simulation-based reference data. The proposed simulator is built on a four-corner vehicle architecture, in which each wheel independently models driving, braking, steering, suspension, and tire dynamics, and is coupled with a six-degree-of-freedom (6-DOF) rigid vehicle body model to capture full vehicle motion. To reproduce vehicle roll, pitch, and vertical load distribution characteristics with sufficient physical fidelity, force and moment interactions among the body, suspension, and tire subsystems are explicitly formulated and numerically integrated in the time domain. An equivalent anti-roll mechanism is implemented using active suspension actuators, in which the anti-roll moment is generated from the left–right suspension stroke difference and distributed to each corner as vertical forces, enabling realistic roll suppression behavior. The developed simulator is validated through direct comparison with CarMaker reference data under identical driving conditions. Key dynamic responses, including roll angle, pitch angle, wheel normal forces, and longitudinal and lateral vehicle motions, are evaluated. The results show that the proposed model closely follows the trends of the reference data and accurately reproduces roll behavior and load transfer characteristics observed in the commercial simulator. In addition, diagonal driving enabled by the e-Corner architecture is analyzed as a representative unconventional maneuver. The proposed model consistently reproduces this motion without inducing yaw rotation, demonstrating its capability to represent the distinctive kinematic and dynamic characteristics unique to e-Corner vehicles. Overall, the proposed simulation framework provides a physically consistent and extensible basis for future studies on active suspension systems, advanced motion control strategies, and comprehensive vehicle dynamics analysis for next-generation mobility platforms. - COLLAPSE
-
- Robust Path Tracking Control of an E-Corner Vehicle under Nonlinear Tire Dynamics Using Soft Actor-Critic
- Eun-jin Jang, Jae-poong Lee, Hee-seung Lim
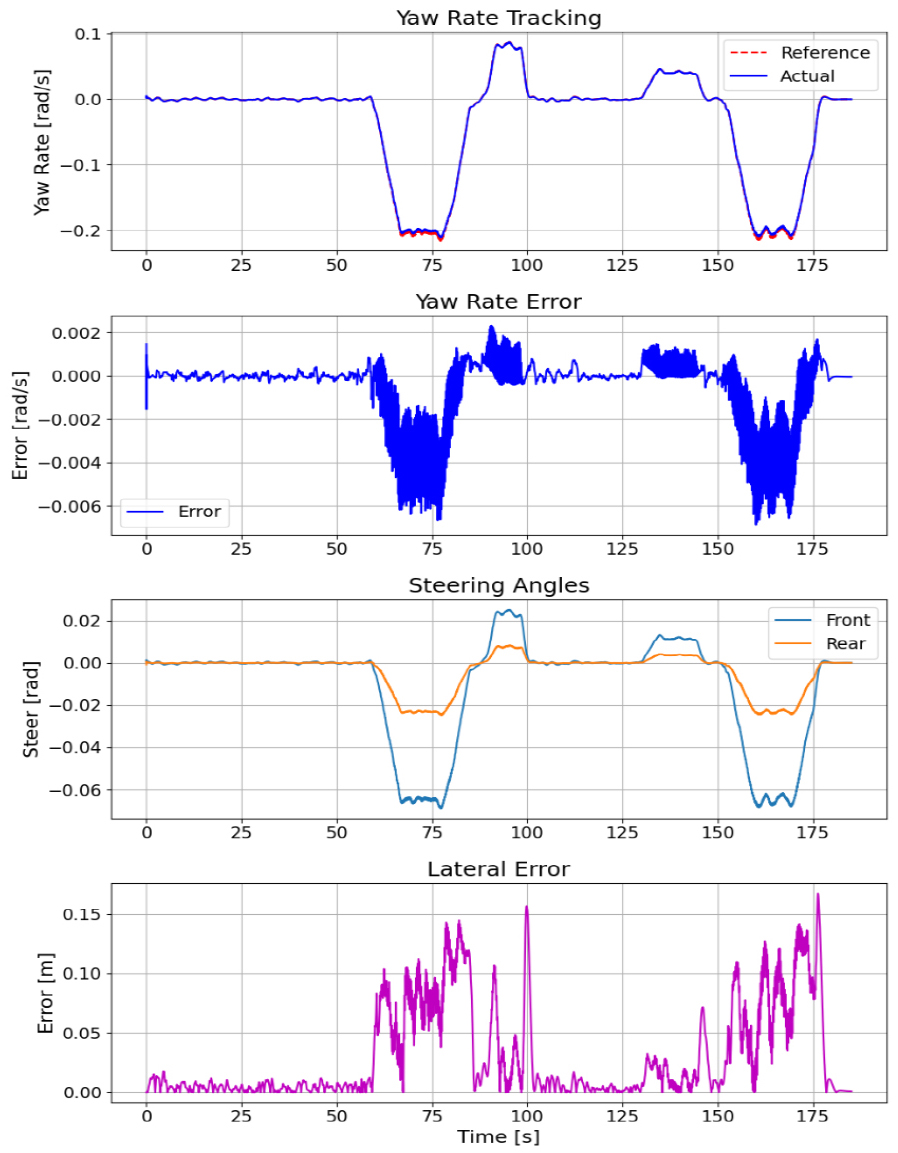
- This paper aims to design a robust path tracking controller for E-Corner vehicles operating under environmental uncertainties and varying driving conditions. To …
- This paper aims to design a robust path tracking controller for E-Corner vehicles operating under environmental uncertainties and varying driving conditions. To this end, we build a vehicle dynamics simulation incorporating the Fiala tire model with a compact parameter set to capture realistic lateral tire behavior. A steering policy is then trained using Soft Actor-Critic, an off-policy reinforcement learning algorithm that maximizes both expected return and policy entropy, thereby promoting robust exploration and stable learning in continuous action spaces. The entropy-regularized objective of SAC enables the policy to remain resilient to modeling uncertainties and variations in vehicle dynamics, which are critical in path tracking tasks under diverse operating conditions. The vehicle model adopts a steering configuration that includes both front-wheel steering and rear-wheel steering to improve yaw rate tracking performance during path tracking maneuvers. Simulation results show that the learned agent maintains stable tracking performance under various conditions, achieving a yaw rate tracking error as low as 0.0023 rad/s at a vehicle speed of 20 m/s. In particular, a policy trained under a weave scenario also exhibits stable path tracking performance when deployed on trajectories acquired from the KIAPI Proving Ground, indicating good transferability beyond the training conditions and improved robustness to unseen path profiles. - COLLAPSE
-
- Model-Based Yaw-Rate Tracking Control with Online Adaptation of Steering and Tire Parameters for an E-Corner-Based Four-Wheel Independent Steering Vehicle
- Yun-m Sung, Jae-poong Lee, Jung-min Cho
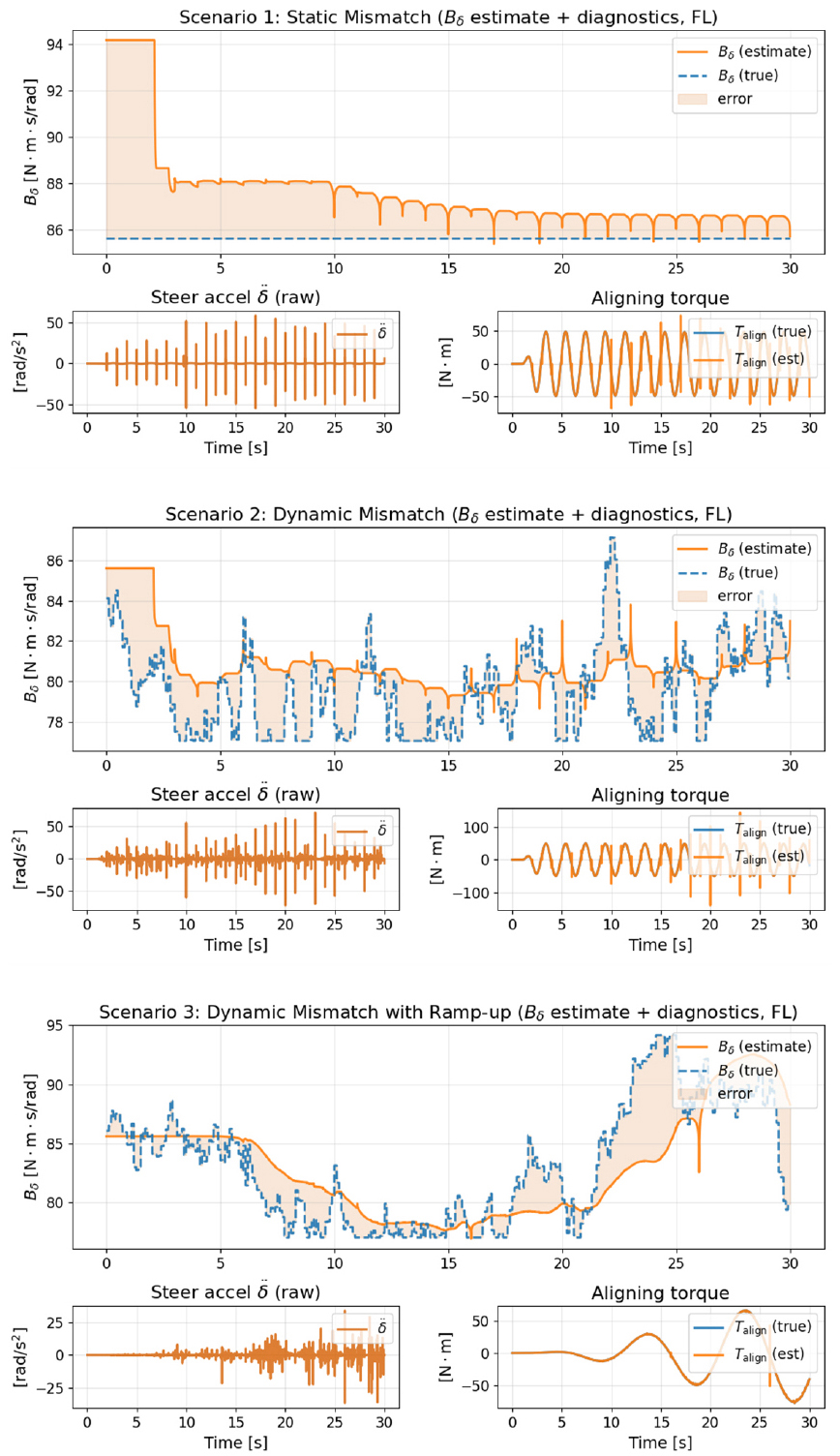
- This paper presents a model-based yaw-rate tracking control framework for an e-corner–based vehicle with four-wheel independent steering (4WIS). Owing to the over-actuated …
- This paper presents a model-based yaw-rate tracking control framework for an e-corner–based vehicle with four-wheel independent steering (4WIS). Owing to the over-actuated nature of the platform, accurate yaw-motion generation requires a consistent connection among vehicle yaw dynamics, tire lateral-force generation, and steering actuator dynamics. A hierarchical feedforward framework is developed to map a desired yaw-rate profile to the required yaw moment, allocate it to per-wheel lateral-force commands, and convert them into per-wheel steering angle and steering motor torque commands via an inverse actuator model. While feedforward control provides fast response and physical interpretability, its performance can degrade under steering actuator uncertainties, tire-parameter variations, and unmodeled disturbances.To mitigate these effects without introducing overly complex robust-control structures, a recursive least-squares (RLS)–based parameter adaptation scheme is integrated into the feedforward pipeline. The proposed method estimates and updates the key model parameters—namely the steering actuator viscous damping and the tire cornering stiffness—from input–output data, and uses the updated parameters to align the feedforward torque/steering command generation with the actual vehicle response. The proposed approach is evaluated in simulation under a deliberate 10% mismatch in the viscous damping and cornering stiffness parameters. Comparative studies are conducted for four configurations: feedforward only, feedforward with yaw-rate feedback, feedforward with RLS adaptation, and feedforward with both RLS adaptation and feedback. The results show that RLS-based adaptation improves yaw-rate tracking robustness under parameter uncertainty and reduces reliance on feedback compensation, achieving stable tracking performance across uncertainty scenarios. - COLLAPSE
-

-
Comparative Analysis of Crush Depth in Internal Combustion Engine Vehicles and Electric Vehicles using Vehicle Crash Test Data
자동차 충돌시험 데이터를 활용한 내연기관차와 전기차 간의 충돌변형량 차이점 고찰
-
Heejin Kang, Naeun Woo, Deokgyu Kim, Giok Park
강희진, 우나은, 김덕규, 박기옥
- This study analyzes differences in frontal crush depth between battery electric vehicles (BEVs) and internal combustion engine vehicles (ICEVs) using 104 full-frontal …
- This study analyzes differences in frontal crush depth between battery electric vehicles (BEVs) and internal combustion engine vehicles (ICEVs) using 104 full-frontal crash tests conducted at approximately 56 km/h. Residual crush depths at six front-end locations (C1–C6), obtained from the National Highway Traffic Safety Administration (NHTSA) database and three-dimensional scanning data from the Korea Automobile Testing & Research Institute (KATRI), were statistically evaluated using the interquartile range (IQR) method. The results show that BEVs exhibit larger median residual crush depth in the central region (C2–C5), while the lateral regions (C1 and C6) display greater residual crush depth variability compared to ICEVs, suggesting differences in load path behavior associated with BEV-specific structural characteristics and limitations in directly applying ICEV-based residual crush depth analysis to BEV accident reconstruction. - COLLAPSE
-
Comparative Analysis of Crush Depth in Internal Combustion Engine Vehicles and Electric Vehicles using Vehicle Crash Test Data
-
-
A Study Battery System for Electric Vehicle Body Design through Structural Simulation
구조해석을 통한 전기자동차 차체 설계를 위한 배터리 시스템에 관한 연구
-
Jae-Woong Lee
이재웅
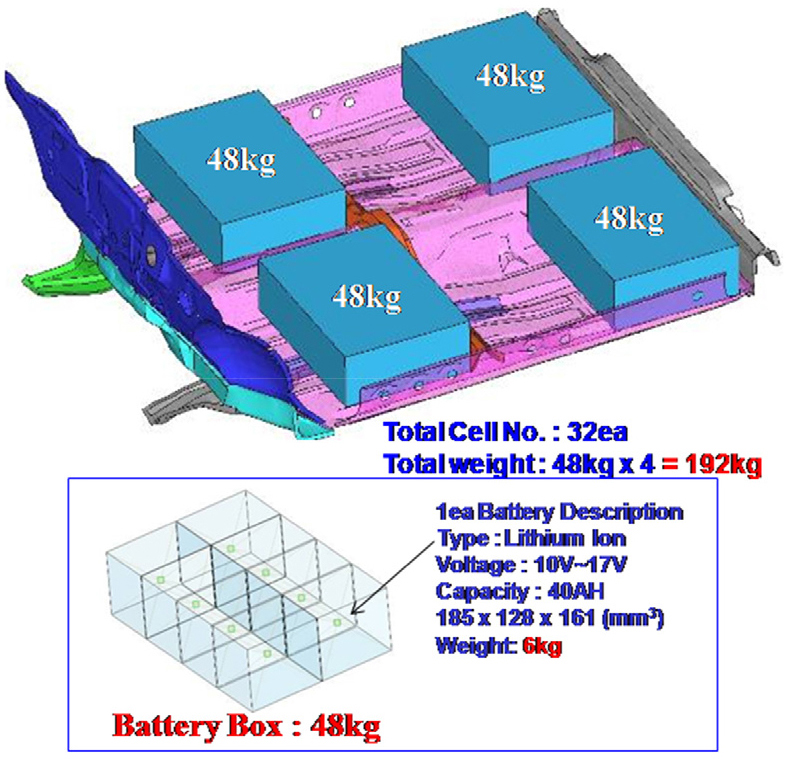
- In the case of electric vehicles, the motor system can replace the combustion engine and provides an environmentally sustainable and very attractive …
- In the case of electric vehicles, the motor system can replace the combustion engine and provides an environmentally sustainable and very attractive power source. However, due to the low power performance of the motor and battery, the weight of the electric vehicle increases significantly to increase the efficiency. In this study, a stiffness analysis was performed to evaluate the safety due to the increased weight of the battery-mounted parts. For this purpose, a CAE (computer-aided engineering) simulation was performed on the entire vehicle (Metro by Geo Co. = base model) model. After the dynamic stiffness analysis, a stiffness enhancement design was proposed to evaluate whether the stiffness of the surrounding structure is safe when the battery is mounted, and a design change idea was proposed to improve the stiffness of the base model. Based on this, a new floor structure was proposed to mount the battery on the vehicle. The new concept model suggests a new design direction as an integrated BIW (body in white) that can easily replace a discharged battery with a newly charged battery, which can be helpful for the future design of advanced electric vehicles. - COLLAPSE
-
A Study Battery System for Electric Vehicle Body Design through Structural Simulation

Journal Informaiton
 Journal of Auto-vehicle Safety Association
Journal of Auto-vehicle Safety Association
Journal of Auto-vehicle Safety Association






한국자동차모빌리티안전학회
Rm. 2001, 13, Seoun-ro, Seocho-gu, Seoul, Republic of Korea
Tel: +82-2-581-8015~6 / E-mail: jlee@kasa.kr Copyright© Korean Auto-vehicle Safety Association. Powered by APUB
Tel: +82-2-581-8015~6 / E-mail: jlee@kasa.kr Copyright© Korean Auto-vehicle Safety Association. Powered by APUB